Recommendation Systems (6): Sequential Recommendation and Session-based Modeling
Chen KaiBOSS
2026-02-03 23:11:112026-02-03 23:119.1k Words56 Mins
permalink: "en/recommendation-systems-6-sequential-recommendation/"
date: 2024-05-27 14:00:00 tags: - Recommendation Systems - Sequential
Recommendation - Session Modeling categories: Recommendation Systems
mathjax: true --- When you scroll through TikTok, each video
recommendation feels like it knows exactly what you want to watch next —
not because it's reading your mind, but because it's analyzing the
sequence of videos you've already watched. The order matters: watching a
cooking video followed by a travel video suggests different preferences
than watching a travel video followed by a cooking video. This temporal
dependency is what sequential recommendation captures.
Traditional recommendation systems treat user-item interactions as
static snapshots, ignoring the rich temporal patterns hidden in
interaction sequences. Sequential recommendation models leverage the
order of interactions to predict what users will click, purchase, or
engage with next. From Markov chains that model simple transition
probabilities, to RNN-based models like GRU4Rec that capture long-term
dependencies, to transformer-based architectures like SASRec and
BERT4Rec that model complex attention patterns, sequential
recommendation has evolved into a cornerstone of modern recommendation
systems.
This article provides a comprehensive exploration of sequential
recommendation, covering foundational concepts (Markov chains,
session-based recommendation), neural sequence models (GRU4Rec, Caser),
transformer-based architectures (SASRec, BERT4Rec, BST), graph neural
networks for sessions (SR-GNN), implementation details with 10+ code
examples, and detailed Q&A sections addressing common questions and
challenges.
What is Sequential
Recommendation?
Definition and Motivation
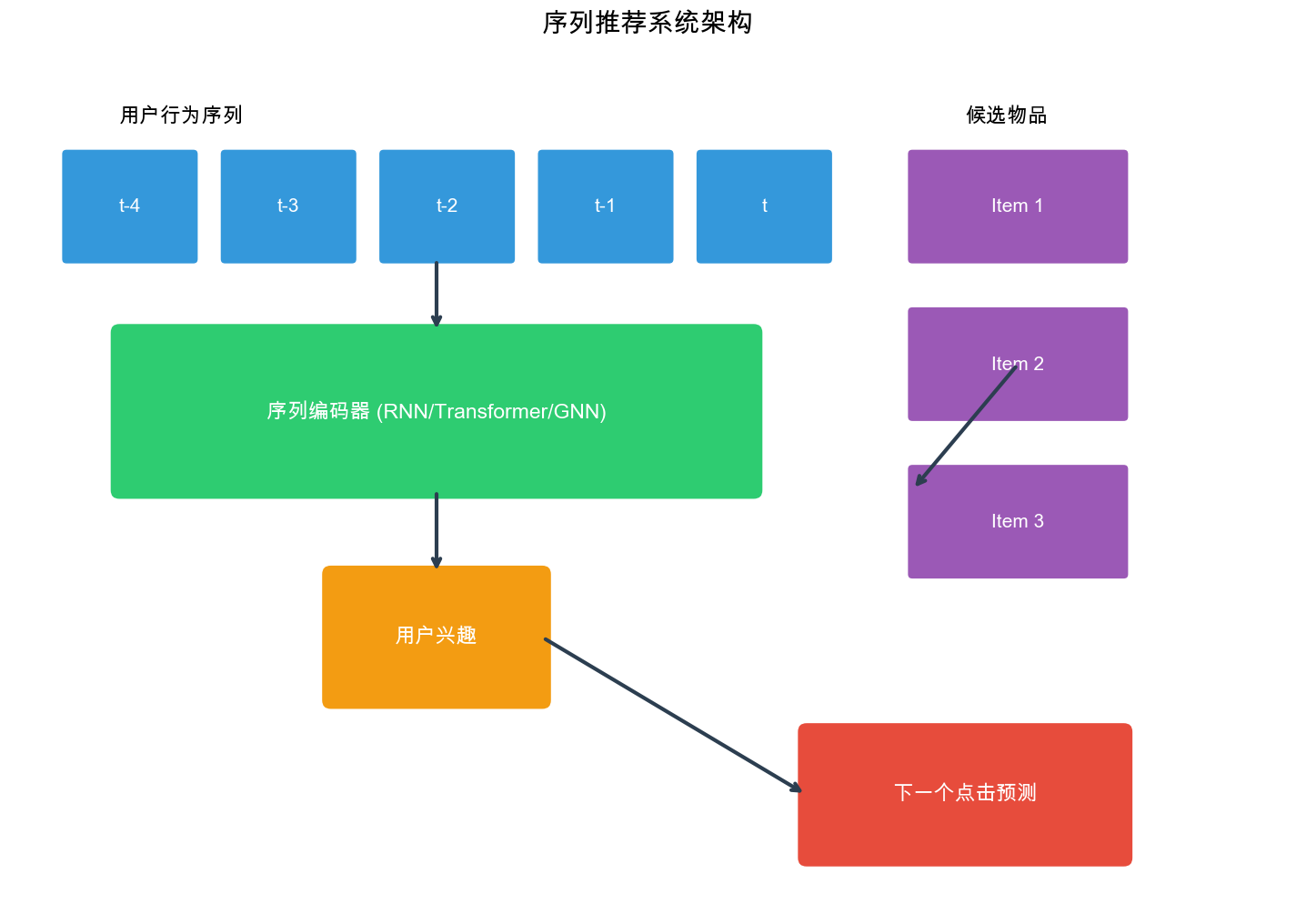
Sequential recommendation is a paradigm that models
user preferences by analyzing the temporal order of their interactions
with items. Unlike traditional collaborative filtering that treats
interactions as independent, sequential recommendation recognizes that
user preferences evolve over time and that the sequence of interactions
contains valuable signals for prediction.
Formally, given a user \(u\)with an
interaction sequence\(S_u = [i_1, i_2, \dots,
i_t]\)where\(i_j\)is the\(j\)-th item the user interacted with,
sequential recommendation aims to predict the next item\(i_{t+1}\)the user will interact with:\[P(i_{t+1} | S_u) = P(i_{t+1} | i_1, i_2, \dots,
i_t)\]The key insight is that the order matters:
the probability of interacting with item\(i_{t+1}\)depends not just on the set of
items seen before, but on their specific ordering.
Why Sequential
Recommendation Matters
Temporal Dynamics: User preferences change over
time. A user who watched action movies last month might now prefer
documentaries. Sequential models capture these shifts.
Context Dependency: The next item depends on recent
context. After watching a movie trailer, you're more likely to watch the
full movie than a random video.
Session Patterns: In e-commerce, users often browse
within sessions. Sequential models can capture session-level patterns
(e.g., "users who view laptops often view laptop bags next").
Cold Start Mitigation: For new users with limited
history, sequential models can leverage the sequence structure even with
few interactions.
Sequential vs.
Traditional Recommendation
Aspect
Traditional CF
Sequential Recommendation
Input
Set of user-item interactions
Ordered sequence of interactions
Temporal Modeling
Ignores order
Explicitly models order
Prediction
\(P(i \| u)\)
\(P(i_{t+1} \| S_u)\)
Use Case
Long-term preferences
Next-item prediction
Example
"Users like you also liked..."
"Based on your recent viewing..."
Types of Sequential
Recommendation
1. User-based Sequential Recommendation: Models the
entire user history as a sequence. Suitable for long-term preference
modeling.
2. Session-based Recommendation: Models short
sessions independently. Each session is a sequence, and sessions are
treated independently. Ideal for anonymous users or short-term
patterns.
3. Hybrid Approaches: Combine user-level and
session-level signals for better prediction.
Markov Chain Models
First-Order Markov Chains
The simplest sequential model is a first-order Markov
chain, which assumes that the next item depends only on the
current item:\[P(i_{t+1} | i_1, i_2, \dots,
i_t) = P(i_{t+1} | i_t)\]This is a strong independence
assumption: it ignores all history except the most recent item.
Transition Matrix: We learn a transition matrix\(M \in \mathbb{R}^{|I| \times
|I|}\)where\(M_{ij} = P(j |
i)\)represents the probability of transitioning from item\(i\)to item\(j\).
Given a sequence\(S = [i_1, i_2, \dots,
i_T]\), we estimate:\[M_{ij} =
\frac{\text{count}(i \rightarrow j)}{\text{count}(i)}\]where\(\text{count}(i \rightarrow j)\)is the
number of times item\(j\)follows
item\(i\)in all sequences, and\(\text{count}(i)\)is the number of times
item\(i\)appears (except as the last
item).
Higher-Order Markov Chains
A \(k\)-th order Markov
chain assumes the next item depends on the last\(k\)items:\[P(i_{t+1} | i_1, i_2, \dots, i_t) = P(i_{t+1} |
i_{t-k+1}, \dots, i_t)\]Higher-order models capture more context
but suffer from data sparsity: the number of possible\(k\)-grams grows exponentially with\(k\).
import numpy as np from collections import defaultdict from typing importList, Dict
classMarkovChainRecommender: """ First-order Markov chain for sequential recommendation. """ def__init__(self, order: int = 1): self.order = order self.transition_counts = defaultdict(lambda: defaultdict(int)) self.item_counts = defaultdict(int) self.items = set() deffit(self, sequences: List[List[int]]): """ Learn transition probabilities from sequences. Args: sequences: List of interaction sequences, each is [item_id1, item_id2, ...] """ for sequence in sequences: self.items.update(sequence) for i inrange(len(sequence) - self.order): # Get the context (last k items) context = tuple(sequence[i:i+self.order]) next_item = sequence[i + self.order] self.transition_counts[context][next_item] += 1 self.item_counts[context] += 1 defpredict_next(self, sequence: List[int], top_k: int = 10) -> List[tuple]: """ Predict next items given a sequence. Args: sequence: Current interaction sequence top_k: Number of top items to return Returns: List of (item_id, probability) tuples """ iflen(sequence) < self.order: # Not enough history, return most popular items return self._get_most_popular(top_k) context = tuple(sequence[-self.order:]) if context notin self.transition_counts: return self._get_most_popular(top_k) # Get transition probabilities transitions = self.transition_counts[context] total = self.item_counts[context] probs = [(item, count / total) for item, count in transitions.items()] probs.sort(key=lambda x: x[1], reverse=True) return probs[:top_k] def_get_most_popular(self, top_k: int) -> List[tuple]: """Fallback to most popular items.""" # Simple implementation: return random items # In practice, you'd maintain global item popularity return [(item, 0.0) for item inlist(self.items)[:top_k]]
# Example usage if __name__ == "__main__": # Sample sequences: users browsing products sequences = [ [1, 2, 3, 4], # User 1: laptop -> mouse -> keyboard -> monitor [1, 2, 5], # User 2: laptop -> mouse -> mousepad [2, 3, 4], # User 3: mouse -> keyboard -> monitor [1, 6, 7], # User 4: laptop -> charger -> bag ] model = MarkovChainRecommender(order=1) model.fit(sequences) # Predict next item for sequence [1, 2] predictions = model.predict_next([1, 2], top_k=5) print("Predictions for sequence [1, 2]:") for item, prob in predictions: print(f" Item {item}: {prob:.3f}")
Limitations of Markov Chains
Data Sparsity: For large item catalogs, most
transitions are never observed. Smoothing techniques (e.g., Laplace
smoothing) help but don't fully solve the problem.
Limited Context: Even higher-order Markov chains
only consider a fixed window of history, missing long-term
dependencies.
No Generalization: Markov chains don't generalize
across similar items. If items\(A\)and\(B\)are similar, a Markov chain doesn't
leverage this similarity.
GRU4Rec: RNN-Based
Sequential Recommendation
Architecture Overview
GRU4Rec (GRU for Recommendation), introduced by Hidasi et al. in
2015, was one of the first deep learning models for session-based
recommendation. It uses Gated Recurrent Units (GRUs) to model sequential
patterns in user sessions.
Key Innovation: Instead of treating sessions as bags
of items, GRU4Rec processes items sequentially, allowing the model to
learn how user preferences evolve within a session.
GRU Architecture
A GRU cell maintains a hidden state\(h_t\)that summarizes the history up to
time\(t\). Given input\(x_t\)(embedding of item\(i_t\)) and previous hidden state\(h_{t-1}\), the GRU computes:
# Example usage if __name__ == "__main__": # Sample sessions sessions = [ [1, 2, 3, 4], [5, 6, 7], [1, 8, 9, 10], [2, 3, 11], ] num_items = max(max(s) for s in sessions) # Create dataset dataset = SessionDataset(sessions, max_len=10) train_loader = DataLoader(dataset, batch_size=2, shuffle=True) # Create model model = GRU4Rec(num_items=num_items, embedding_dim=64, hidden_dim=64) # Train train_gru4rec(model, train_loader, num_epochs=5) # Predict predictions = model.predict_next([1, 2, 3], top_k=5) print("\nPredictions for sequence [1, 2, 3]:") for item, score in predictions: print(f" Item {item}: {score:.3f}")
Advantages and Limitations
Advantages: - Captures sequential dependencies -
Handles variable-length sequences - Can model long-term dependencies
(with sufficient capacity)
Limitations: - Sequential processing is slow (can't
parallelize) - Difficulty capturing very long dependencies - Fixed
context window in practice
Caser: Convolutional
Sequence Embedding
Motivation
Caser (Convolutional Sequence Embedding), introduced by Tang and Wang
in 2018, applies convolutional neural networks to sequential
recommendation. Unlike RNNs that process sequences sequentially, CNNs
can process sequences in parallel and capture both local and global
patterns through different filter sizes.
Union-level: Captures union patterns (combinations
of items)
The model uses horizontal and vertical convolutional filters:
Horizontal Filters: Slide over the sequence to
capture union-level patterns of different lengths.
Vertical Filters: Operate on the embedding dimension
to capture point-level patterns.
Mathematical Formulation
Given a sequence\(S = [i_1, i_2, \dots,
i_t]\)and embeddings\(\mathbf{E} =
[\mathbf{e}_1, \mathbf{e}_2, \dots, \mathbf{e}_t] \in \mathbb{R}^{t
\times d}\), Caser applies:
Horizontal Convolution: For filter size\(h\):\[\mathbf{c}_h =
\text{ReLU}(\text{Conv1D}_h(\mathbf{E}))\]
Vertical Convolution:\[\mathbf{c}_v =
\text{ReLU}(\text{Conv2D}(\mathbf{E}))\]The outputs are
concatenated and passed through fully connected layers to predict the
next item.
# Example usage if __name__ == "__main__": num_items = 1000 model = Caser(num_items=num_items, embedding_dim=50, max_len=50) # Sample sequence sequence = [1, 2, 3, 4, 5] predictions = model.predict_next(sequence, top_k=5) print("Caser predictions:") for item, score in predictions: print(f" Item {item}: {score:.3f}")
Advantages of Caser
Parallel Processing: CNNs process sequences in
parallel, faster than RNNs
Multi-scale Patterns: Different filter sizes
capture patterns at different scales
Local Patterns: Excellent at capturing local
sequential patterns
SASRec:
Self-Attention for Sequential Recommendation
Transformer Architecture
SASRec (Self-Attention Sequential Recommendation), introduced by Kang
and McAuley in 2018, adapts the Transformer architecture for sequential
recommendation. It uses self-attention mechanisms to model long-range
dependencies without the sequential processing bottleneck of RNNs.
Key Components
1. Self-Attention Mechanism: Allows each position to
attend to all previous positions:\[\text{Attention}(Q, K, V) =
\text{softmax}\left(\frac{QK^T}{\sqrt{d_k }}\right)V\]where\(Q\),\(K\),\(V\)are query, key, and value matrices
derived from item embeddings.
2. Positional Encoding: Since Transformers have no
inherent notion of order, positional encodings are added to
embeddings:$\(PE_{(pos, 2i)} = \sin(pos /
10000^{2i/d})\) $
\[PE_{(pos, 2i+1)} = \cos(pos /
10000^{2i/d})\]
3. Point-wise Feed-Forward Networks: Applied after
attention for non-linearity.
4. Layer Normalization and Residual Connections:
Enable training of deep networks.
classTransformerBlock(nn.Module): """Transformer block with self-attention and feed-forward.""" def__init__(self, d_model, num_heads, d_ff, dropout=0.1): super(TransformerBlock, self).__init__() self.attention = MultiHeadAttention(d_model, num_heads, dropout) self.norm1 = nn.LayerNorm(d_model) self.norm2 = nn.LayerNorm(d_model) self.feed_forward = nn.Sequential( nn.Linear(d_model, d_ff), nn.ReLU(), nn.Dropout(dropout), nn.Linear(d_ff, d_model), nn.Dropout(dropout) ) defforward(self, x, mask=None): # Self-attention with residual attn_out, _ = self.attention(x, x, x, mask) x = self.norm1(x + attn_out) # Feed-forward with residual ff_out = self.feed_forward(x) x = self.norm2(x + ff_out) return x
classSASRec(nn.Module): """ SASRec: Self-Attention Sequential Recommendation. """ def__init__(self, num_items: int, d_model: int = 128, num_heads: int = 2, num_layers: int = 2, d_ff: int = 256, max_len: int = 50, dropout: float = 0.1): super(SASRec, self).__init__() self.num_items = num_items self.d_model = d_model self.max_len = max_len # Item embedding self.item_embedding = nn.Embedding(num_items + 1, d_model, padding_idx=0) # Positional encoding self.pos_encoding = PositionalEncoding(d_model, max_len) # Transformer blocks self.transformer_blocks = nn.ModuleList([ TransformerBlock(d_model, num_heads, d_ff, dropout) for _ inrange(num_layers) ]) # Dropout self.dropout = nn.Dropout(dropout) # Output layer self.output = nn.Linear(d_model, num_items + 1) self._init_weights() def_init_weights(self): """Initialize weights.""" nn.init.normal_(self.item_embedding.weight, mean=0, std=0.01) nn.init.xavier_uniform_(self.output.weight) nn.init.zeros_(self.output.bias) def_generate_mask(self, sequences): """ Generate causal mask for sequences. Args: sequences: (batch_size, seq_len) Returns: mask: (batch_size, seq_len, seq_len) """ batch_size, seq_len = sequences.size() # Causal mask: can attend to current and previous positions mask = torch.tril(torch.ones(seq_len, seq_len)).unsqueeze(0).repeat(batch_size, 1, 1) # Mask out padding positions padding_mask = (sequences != 0).unsqueeze(1).unsqueeze(2) mask = mask * padding_mask.float() return mask.to(sequences.device) defforward(self, sequences): """ Forward pass. Args: sequences: (batch_size, seq_len) tensor of item indices Returns: logits: (batch_size, seq_len, num_items+1) prediction logits """ # Embed items embedded = self.item_embedding(sequences) * math.sqrt(self.d_model) # Add positional encoding embedded = self.pos_encoding(embedded) embedded = self.dropout(embedded) # Generate mask mask = self._generate_mask(sequences) # Pass through transformer blocks x = embedded for transformer in self.transformer_blocks: x = transformer(x, mask) # Predict next items logits = self.output(x) # (batch, seq_len, num_items+1) return logits defpredict_next(self, sequence, top_k=10): """Predict next items.""" self.eval() with torch.no_grad(): # Pad or truncate sequence iflen(sequence) > self.max_len: sequence = sequence[-self.max_len:] else: sequence = [0] * (self.max_len - len(sequence)) + sequence seq_tensor = torch.LongTensor([sequence]).to(next(self.parameters()).device) logits = self.forward(seq_tensor) # Get prediction for last position last_logits = logits[0, -1, :] top_scores, top_indices = torch.topk(last_logits, k=min(top_k, self.num_items)) return [(idx.item(), score.item()) for idx, score inzip(top_indices, top_scores)]
# Example usage if __name__ == "__main__": num_items = 1000 model = SASRec(num_items=num_items, d_model=128, num_heads=2, num_layers=2) sequence = [1, 2, 3, 4, 5] predictions = model.predict_next(sequence, top_k=5) print("SASRec predictions:") for item, score in predictions: print(f" Item {item}: {score:.3f}")
Advantages of SASRec
Long-range Dependencies: Self-attention can model
dependencies across the entire sequence
Parallel Processing: All positions processed
simultaneously
Interpretability: Attention weights show which
items influence predictions
Scalability: Efficient for long sequences
BERT4Rec:
Bidirectional Encoder for Sequential Recommendation
Motivation
BERT4Rec, introduced by Sun et al. in 2019, adapts BERT
(Bidirectional Encoder Representations from Transformers) for sequential
recommendation. Unlike SASRec which uses causal (unidirectional)
attention, BERT4Rec uses bidirectional attention, allowing each position
to attend to both past and future items.
Key Innovation: Cloze Task
BERT4Rec trains using a cloze task (masked language
modeling): randomly mask some items in the sequence and predict them
from context. This bidirectional training allows the model to leverage
both past and future context.
Architecture Differences
from SASRec
Bidirectional Attention: No causal mask; each
position can attend to all positions
Masked Training: Randomly mask items during
training
Two-stage Training: Pre-training on large datasets,
then fine-tuning
import torch import torch.nn as nn import torch.nn.functional as F import math import random
classBERT4Rec(nn.Module): """ BERT4Rec: Bidirectional Encoder for Sequential Recommendation. """ def__init__(self, num_items: int, d_model: int = 128, num_heads: int = 2, num_layers: int = 2, d_ff: int = 256, max_len: int = 50, dropout: float = 0.1, mask_prob: float = 0.15): super(BERT4Rec, self).__init__() self.num_items = num_items self.d_model = d_model self.max_len = max_len self.mask_prob = mask_prob # Special tokens: [PAD]=0, [MASK]=num_items+1 self.mask_token = num_items + 1 # Item embedding (including mask token) self.item_embedding = nn.Embedding(num_items + 2, d_model, padding_idx=0) # Positional encoding self.pos_encoding = PositionalEncoding(d_model, max_len) # Transformer blocks (bidirectional, no causal mask) self.transformer_blocks = nn.ModuleList([ TransformerBlock(d_model, num_heads, d_ff, dropout) for _ inrange(num_layers) ]) self.dropout = nn.Dropout(dropout) # Output layer self.output = nn.Linear(d_model, num_items + 1) self._init_weights() def_init_weights(self): """Initialize weights.""" nn.init.normal_(self.item_embedding.weight, mean=0, std=0.01) nn.init.xavier_uniform_(self.output.weight) nn.init.zeros_(self.output.bias) def_generate_mask(self, sequences): """ Generate padding mask (no causal mask for bidirectional). Args: sequences: (batch_size, seq_len) Returns: mask: (batch_size, seq_len, seq_len) """ batch_size, seq_len = sequences.size() # All positions can attend to all positions (except padding) mask = (sequences != 0).unsqueeze(1).unsqueeze(2).float() mask = mask.repeat(1, seq_len, seq_len) return mask.to(sequences.device) def_mask_sequence(self, sequences): """ Randomly mask items for cloze task training. Args: sequences: (batch_size, seq_len) Returns: masked_sequences: (batch_size, seq_len) with some items masked masked_positions: (batch_size, seq_len) boolean mask """ masked_sequences = sequences.clone() masked_positions = torch.zeros_like(sequences, dtype=torch.bool) for i inrange(sequences.size(0)): for j inrange(sequences.size(1)): if sequences[i, j] != 0: # Not padding if random.random() < self.mask_prob: masked_positions[i, j] = True # 80% mask, 10% random, 10% unchanged rand = random.random() if rand < 0.8: masked_sequences[i, j] = self.mask_token elif rand < 0.9: masked_sequences[i, j] = random.randint(1, self.num_items) # else: keep original return masked_sequences, masked_positions defforward(self, sequences, training=True): """ Forward pass. Args: sequences: (batch_size, seq_len) tensor of item indices training: If True, apply masking for cloze task Returns: logits: (batch_size, seq_len, num_items+1) prediction logits masked_positions: (batch_size, seq_len) positions that were masked """ if training: sequences, masked_positions = self._mask_sequence(sequences) else: masked_positions = torch.zeros_like(sequences, dtype=torch.bool) # Embed items embedded = self.item_embedding(sequences) * math.sqrt(self.d_model) # Add positional encoding embedded = self.pos_encoding(embedded) embedded = self.dropout(embedded) # Generate padding mask (bidirectional attention) mask = self._generate_mask(sequences) # Pass through transformer blocks x = embedded for transformer in self.transformer_blocks: x = transformer(x, mask) # Predict items logits = self.output(x) # (batch, seq_len, num_items+1) return logits, masked_positions defpredict_next(self, sequence, top_k=10): """ Predict next items. For inference, we append a [MASK] token. """ self.eval() with torch.no_grad(): # Append mask token iflen(sequence) >= self.max_len: sequence = sequence[-(self.max_len-1):] + [self.mask_token] else: sequence = sequence + [self.mask_token] # Pad to max_len sequence = [0] * (self.max_len - len(sequence)) + sequence seq_tensor = torch.LongTensor([sequence]).to(next(self.parameters()).device) logits, _ = self.forward(seq_tensor, training=False) # Get prediction for mask token position mask_pos = sequence.index(self.mask_token) mask_logits = logits[0, mask_pos, :] top_scores, top_indices = torch.topk(mask_logits, k=min(top_k, self.num_items)) return [(idx.item(), score.item()) for idx, score inzip(top_indices, top_scores)]
# Example usage if __name__ == "__main__": num_items = 1000 model = BERT4Rec(num_items=num_items, d_model=128, num_heads=2, num_layers=2) sequence = [1, 2, 3, 4, 5] predictions = model.predict_next(sequence, top_k=5) print("BERT4Rec predictions:") for item, score in predictions: print(f" Item {item}: {score:.3f}")
Advantages of BERT4Rec
Bidirectional Context: Leverages both past and
future information
Better Representations: Pre-training on large
datasets learns rich item representations
Robustness: Masked training makes the model more
robust to missing items
Limitations
Inference Complexity: Requires masking during
inference, which is less intuitive than autoregressive prediction
Training Complexity: Two-stage training
(pre-training + fine-tuning) is more complex
BST: Behavior Sequence
Transformer
Introduction
BST (Behavior Sequence Transformer), introduced by Chen et al. in
2019, extends the Transformer architecture to incorporate rich feature
information beyond item IDs. It's designed for e-commerce recommendation
where user behaviors include clicks, views, purchases, and various item
features.
Key Features
Multi-field Features: Incorporates item features
(category, brand, price), user features, and context features
Behavior Sequence: Models sequences of user
behaviors (not just items)
Feature Interaction: Uses point-wise and
element-wise feature interactions
Architecture
BST consists of:
Embedding Layer: Embeds item IDs and all feature
fields
Positional Encoding: Adds positional
information
Transformer Layers: Self-attention over behavior
sequences
MLP Layers: Final prediction with feature
interactions
Session-based recommendation is a special case of
sequential recommendation where each session is treated independently. A
session is a sequence of interactions within a short time period (e.g.,
a single browsing session on an e-commerce site).
Key Characteristics
No User Identity: Sessions may be anonymous (no
user login)
Short Sequences: Sessions are typically short (5-20
items)
Independence: Sessions are treated independently
(no cross-session modeling)
Real-time: Need to make predictions quickly as
users browse
Applications
E-commerce: "Users who viewed this also
viewed..."
News Websites: Next article recommendation
Music Streaming: Next song in playlist
Video Platforms: Next video recommendation
Challenges
Limited Context: Short sequences provide limited
information
Cold Start: New items or sessions with few
interactions
Temporal Dynamics: User intent may change within a
session
Scalability: Need to handle millions of concurrent
sessions
SR-GNN:
Session-based Recommendation with Graph Neural Networks
Motivation
SR-GNN (Session-based Recommendation with Graph Neural Networks),
introduced by Wu et al. in 2019, models sessions as graphs where items
are nodes and transitions are edges. This graph structure captures
complex transition patterns that sequential models might miss.
Graph Construction
For a session\(S = [i_1, i_2, \dots,
i_t]\), construct a directed graph\(G =
(V, E)\)where: - Nodes: Items in the session -
Edges: Transitions between consecutive items -
Edge Weights: Frequency of transitions (if an item
appears multiple times)
Graph Neural Network
SR-GNN uses a gated graph neural network (GGNN) to
learn node embeddings:
Message Passing: Each node aggregates messages from
its neighbors:\[\mathbf{m}_v^{(l)} = \sum_{u
\in \mathcal{N}(v)} \mathbf{A}_{uv} \mathbf{h}_u^{(l-1)}\]
import torch import torch.nn as nn import torch.nn.functional as F import numpy as np from torch_geometric.nn import MessagePassing from torch_geometric.utils import add_self_loops, degree
Repeated Items: Handles items that appear multiple
times in a session
Local Patterns: Graph structure captures local
neighborhood patterns
Evaluation
Metrics for Sequential Recommendation
Common Metrics
1. Hit Rate (HR@K): Fraction of test cases where the
ground truth item appears in top-K recommendations.\[HR@K = \frac{1}{|T|} \sum_{t \in T}
\mathbb{1}[\text{rank}(i_t^*) \leq K]\]
2. Normalized Discounted Cumulative Gain (NDCG@K):
Considers position of the correct item.\[NDCG@K = \frac{1}{|T|} \sum_{t \in T}
\frac{\mathbb{1}[\text{rank}(i_t^*) \leq K]}{\log_2(\text{rank}(i_t^*) +
1)}\]
3. Mean Reciprocal Rank (MRR): Average reciprocal
rank of the first relevant item.\[MRR =
\frac{1}{|T|} \sum_{t \in T} \frac{1}{\text{rank}(i_t^*)}\]
4. Coverage: Fraction of items that appear in at
least one recommendation list.
5. Diversity: Measures how diverse recommendations
are (e.g., intra-list diversity).
defhit_rate_at_k(predictions: List[List[int]], ground_truth: List[int], k: int = 10) -> float: """ Compute Hit Rate@K. Args: predictions: List of top-K predicted item lists ground_truth: List of ground truth items k: Top-K Returns: Hit rate """ hits = 0 for pred, truth inzip(predictions, ground_truth): if truth in pred[:k]: hits += 1 return hits / len(ground_truth)
defndcg_at_k(predictions: List[List[int]], ground_truth: List[int], k: int = 10) -> float: """ Compute NDCG@K. Args: predictions: List of top-K predicted item lists ground_truth: List of ground truth items k: Top-K Returns: NDCG@K """ ndcg_scores = [] for pred, truth inzip(predictions, ground_truth): if truth in pred[:k]: rank = pred[:k].index(truth) + 1 ndcg = 1.0 / np.log2(rank + 1) else: ndcg = 0.0 ndcg_scores.append(ndcg) return np.mean(ndcg_scores)
defmrr(predictions: List[List[int]], ground_truth: List[int]) -> float: """ Compute Mean Reciprocal Rank. Args: predictions: List of predicted item lists ground_truth: List of ground truth items Returns: MRR """ reciprocal_ranks = [] for pred, truth inzip(predictions, ground_truth): if truth in pred: rank = pred.index(truth) + 1 reciprocal_ranks.append(1.0 / rank) else: reciprocal_ranks.append(0.0) return np.mean(reciprocal_ranks)
# Example usage if __name__ == "__main__": predictions = [ [1, 2, 3, 4, 5], [6, 7, 8, 9, 10], [11, 12, 13, 14, 15], ] ground_truth = [3, 7, 20] # Third item in first list, second in second, none in third hr10 = hit_rate_at_k(predictions, ground_truth, k=10) ndcg10 = ndcg_at_k(predictions, ground_truth, k=10) mrr_score = mrr(predictions, ground_truth) print(f"HR@10: {hr10:.3f}") print(f"NDCG@10: {ndcg10:.3f}") print(f"MRR: {mrr_score:.3f}")
Practical Considerations
Data Preprocessing
1. Sequence Padding/Truncation: Sequences have
variable lengths. Common approaches: - Fixed Length:
Pad short sequences, truncate long ones - Dynamic
Batching: Group sequences of similar lengths - Sliding
Window: For very long sequences, use sliding windows
2. Negative Sampling: For implicit feedback, sample
negative items for training: - Random Sampling: Sample
uniformly - Popularity-based: Sample according to item
popularity - Hard Negative Mining: Sample difficult
negatives
1. Loss Functions: - Cross-Entropy:
Standard classification loss - BPR (Bayesian Personalized
Ranking): Pairwise ranking loss - TOP1:
Another pairwise ranking loss - Sampled Softmax:
Efficient for large item vocabularies
2. Regularization: - Dropout:
Prevent overfitting - Weight Decay: L2 regularization -
Early Stopping: Stop when validation performance
plateaus
3. Optimization: - Adam/AdamW:
Common optimizers - Learning Rate Scheduling: Reduce
learning rate over time - Gradient Clipping: Prevent
exploding gradients
Scalability
1. Efficient Inference: - Approximate
Nearest Neighbor: Use FAISS, Annoy for fast retrieval -
Model Quantization: Reduce model size - Model
Distillation: Train smaller models
2. Distributed Training: - Data
Parallelism: Split data across GPUs - Model
Parallelism: Split model across devices - Parameter
Servers: For very large models
Complete Training Example
Here's a complete example training a SASRec model on a synthetic
dataset:
Q1:
What's the difference between sequential recommendation and traditional
collaborative filtering?
A: Traditional collaborative filtering treats
user-item interactions as a static set, ignoring temporal order.
Sequential recommendation explicitly models the order of interactions,
recognizing that user preferences evolve over time and that the sequence
of interactions contains valuable signals. Sequential models
predict\(P(i_{t+1} | i_1, i_2, \dots,
i_t)\)rather than\(P(i |
u)\).
Q2:
When should I use session-based vs. user-based sequential
recommendation?
A: Use session-based recommendation
when: - Users are anonymous (no login) - Sessions are short and
independent - You need real-time predictions - Examples: e-commerce
browsing, news websites
Use user-based sequential recommendation when: - You
have user identity and long-term history - You want to model long-term
preference evolution - Cross-session patterns are important - Examples:
music streaming with user accounts, video platforms with user
history
Q3: How do I
handle variable-length sequences?
A: Common approaches: 1. Padding:
Pad short sequences with a special token (e.g., 0) to a fixed length 2.
Truncation: Truncate long sequences to a maximum length
(keep recent items) 3. Dynamic Batching: Group
sequences of similar lengths in batches to minimize padding 4.
Sliding Windows: For very long sequences, use sliding
windows of fixed size
Q4:
What's the advantage of transformer-based models (SASRec, BERT4Rec) over
RNNs (GRU4Rec)?
A: Transformers offer several advantages: -
Parallel Processing: All positions processed
simultaneously (faster training) - Long-range
Dependencies: Self-attention can model dependencies across the
entire sequence - Interpretability: Attention weights
show which items influence predictions - Scalability:
Better performance on long sequences
RNNs are still useful for: - Real-time streaming (process items one
by one) - Memory efficiency (lower memory footprint) - Simpler
architecture (easier to understand and debug)
Q5:
How does BERT4Rec's bidirectional attention work for next-item
prediction?
A: BERT4Rec uses bidirectional attention during
training (cloze task: predict masked items from
context). During inference, you append a
[MASK] token to the sequence and predict what should fill
that position. This allows the model to leverage both past and future
context during training, learning richer representations. However, the
inference process is less intuitive than autoregressive prediction.
Q6:
What's the difference between Caser's horizontal and vertical
convolutions?
A: - Horizontal Convolutions: Slide
along the sequence dimension, capturing union-level patterns
(combinations of items at different positions). Different filter sizes
capture patterns of different lengths (e.g., 2-grams, 3-grams, 4-grams).
- Vertical Convolutions: Operate on the embedding
dimension, capturing point-level patterns (features of individual
items). They aggregate information across the entire sequence for each
embedding dimension.
Together, they capture both local sequential patterns and item-level
features.
Q7:
How do I choose the sequence length (max_len) for my model?
A: Consider: 1. Data Distribution:
Analyze your data — what's the median/mean sequence length? Set max_len
to cover most sequences (e.g., 90th percentile). 2.
Computational Budget: Longer sequences require more
memory and computation. Balance between coverage and efficiency. 3.
Model Architecture: RNNs may struggle with very long
sequences (>100), while transformers can handle longer sequences
(200+). 4. Domain: E-commerce sessions are typically
short (10-20 items), while music playlists can be long (100+ items).
Common choices: 20-50 for sessions, 50-200 for user sequences.
Q8:
How do I handle cold start for new items or new users?
A: For new items: - Use item
features (category, brand, price) if available (like BST) - Initialize
embeddings from similar items - Use content-based features
For new users: - Start with popular items or
trending items - Use demographic features if available - Leverage
session-based models (don't need user history) - Use exploration
strategies (e.g., bandit algorithms)
Q9: What evaluation
metrics should I use?
A: Common metrics: - Hit Rate@K
(HR@K): Fraction of test cases where ground truth is in top-K.
Simple and interpretable. - NDCG@K: Considers position
— higher score if correct item ranks higher. Standard for ranking tasks.
- MRR: Average reciprocal rank. Good for scenarios
where only one item is relevant.
For production, also consider: - Coverage: Fraction
of items recommended - Diversity: How diverse
recommendations are - Business Metrics: Click-through
rate, conversion rate, revenue
Q10:
How do I handle implicit vs. explicit feedback in sequential
recommendation?
A: - Explicit Feedback (ratings,
reviews): Can use regression losses (MSE) or classification losses
(cross-entropy with rating classes). - Implicit
Feedback (clicks, views, purchases): Use ranking losses: -
BPR (Bayesian Personalized Ranking): Pairwise ranking
loss - TOP1: Another pairwise loss - Sampled
Softmax: Efficient for large vocabularies - Negative
Sampling: Sample negative items for training
Most sequential recommendation scenarios use implicit feedback, so
ranking losses are common.
Q11:
Can I combine sequential recommendation with other approaches?
A: Yes! Common hybrid approaches: 1.
Sequential + Collaborative Filtering: Combine
sequential signals with user-item similarity 2. Sequential +
Content-based: Use item features (like BST) along with
sequences 3. Sequential + Knowledge Graph: Incorporate
item relationships from knowledge graphs 4. Multi-task
Learning: Predict next item and other objectives (e.g., rating
prediction, category prediction)
Q12:
How do I scale sequential recommendation to millions of items?
A: Strategies: 1. Negative
Sampling: Sample a subset of items for training (don't compute
over all items) 2. Approximate Nearest Neighbor: Use
FAISS, Annoy, HNSW for fast retrieval 3. Two-stage
Retrieval: First retrieve candidates (e.g., using embeddings),
then rank with the full model 4. Model Distillation:
Train a smaller, faster model 5. Quantization: Reduce
precision (e.g., FP16, INT8) 6. Caching: Cache
embeddings and predictions
Q13:
What's the role of positional encoding in transformer-based sequential
models?
A: Transformers have no inherent notion of order
(they're permutation-invariant). Positional encoding adds order
information: - Absolute Positional Encoding: Each
position gets a unique encoding (used in SASRec) - Relative
Positional Encoding: Encodes relative distances between
positions - Learned Positional Encoding: Learn position
embeddings during training
Without positional encoding, the model would treat
[A, B, C] the same as [C, B, A], which is
incorrect for sequential recommendation.
Q14:
How do I prevent overfitting in sequential recommendation models?
A: Regularization techniques: 1.
Dropout: Apply dropout to embeddings and hidden layers
(typically 0.1-0.5) 2. Weight Decay: L2 regularization
on parameters 3. Early Stopping: Stop training when
validation performance plateaus 4. Data Augmentation:
Create more training examples (sequence cropping, masking) 5.
Label Smoothing: Smooth target distributions 6.
Sequence Length Regularization: Penalize very long
sequences
Q15:
What are the latest trends in sequential recommendation?
A: Recent trends (2023-2025): 1. Large
Language Models: Using LLMs (GPT, BERT) for sequential
recommendation 2. Contrastive Learning: Learning
representations via contrastive objectives 3. Graph Neural
Networks: Modeling item relationships as graphs (SR-GNN,
GCE-GNN) 4. Multi-modal: Incorporating images, text,
audio into sequences 5. Causal Inference: Understanding
causal relationships in sequences 6. Efficiency: Model
compression, efficient attention mechanisms (Linformer, Performer) 7.
Personalization: Better handling of user-specific
patterns
Summary
Sequential recommendation is a fundamental paradigm in modern
recommendation systems, modeling the temporal order of user interactions
to predict next items. From simple Markov chains to sophisticated
transformer-based architectures, sequential models have evolved to
capture complex patterns in user behavior.
Key Takeaways:
Order Matters: The sequence of interactions
contains valuable signals for prediction
Model Evolution: From Markov chains → RNNs → CNNs →
Transformers → Graph Neural Networks
Session vs. User: Session-based models handle
anonymous users and short-term patterns; user-based models capture
long-term preferences
Architecture Choice: Choose based on sequence
length, computational budget, and requirements
Evaluation: Use ranking metrics (HR@K, NDCG@K, MRR)
for implicit feedback scenarios
Scalability: Use negative sampling, approximate
nearest neighbor search, and two-stage retrieval for large-scale
deployment
Future Directions:
Integration with large language models
Better handling of multi-modal sequences
Causal inference for understanding user behavior
More efficient architectures for real-time recommendation
Sequential recommendation continues to be an active area of research,
with new architectures and techniques emerging regularly. Understanding
these fundamentals provides a solid foundation for both research and
practical applications.
Post title:Recommendation Systems (6): Sequential Recommendation and Session-based Modeling
Post author:Chen Kai
Create time:2026-02-03 23:11:11
Post link:https://www.chenk.top/recommendation-systems-6-sequential-recommendation/
Copyright Notice:All articles in this blog are licensed under BY-NC-SA unless stating additionally.