正交性是线性代数中最优美的概念之一。当两个向量"互不干扰"时,计算变得简单,理解变得清晰。从 GPS 定位到降噪耳机,从图像压缩到推荐系统,正交性的应用无处不在。本章将从直觉出发,带你理解正交性的深层含义,以及它为何是现代科学计算的基石。
什么是正交?从直觉开始
生活中的"正交"
在进入数学定义之前,让我们先感受一下"正交"在生活中的含义。
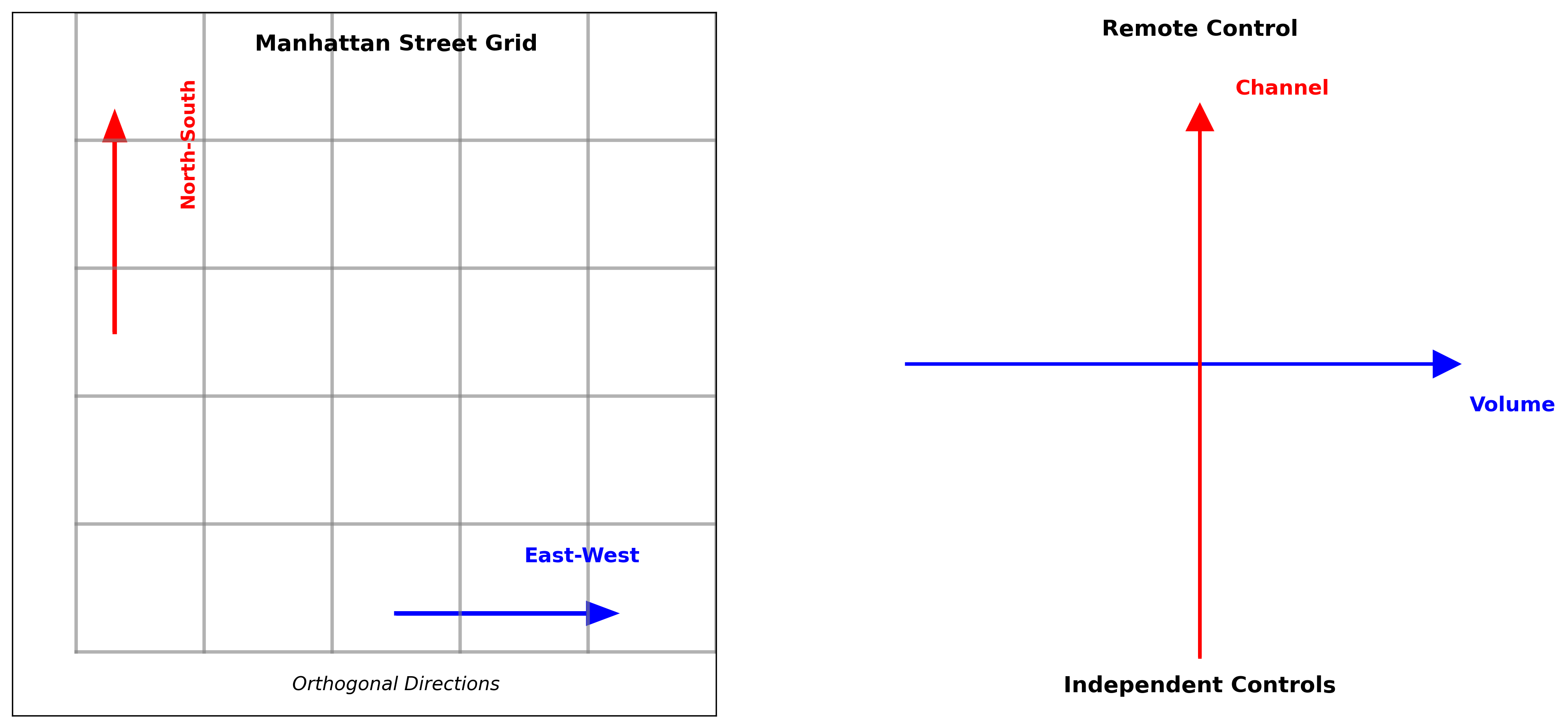
城市街道:曼哈顿的街道呈网格状排列,南北向和东西向的街道互相垂直。如果你往东走了 3 个街区,这完全不影响你在南北方向的位置。这就是正交——两个方向彼此独立,互不影响。
电视遥控器:遥控器上有音量键和频道键。按音量键不会换台,按频道键不会改变音量。音量和频道是"正交"的控制维度。
调味料:做菜时,盐控制咸度,糖控制甜度。在一定范围内,加盐不会让菜变甜,加糖不会让菜变咸(当然,烹饪学家可能会反驳这个简化的说法)。
这种"互不干扰"的性质,在数学上对应着一个简洁的条件:点积为零。
正交的数学定义
两个向量
用分量形式写出来就是:
为什么点积为零意味着垂直? 回忆点积的几何公式:
当
几个重要的特殊情况:
- 零向量与任何向量正交:
对所有 成立 - 标准基向量两两正交:
与 正交 - 向量与自身正交当且仅当它是零向量:
正交性的深层含义:信息独立
正交性的本质是信息独立。当两个向量正交时,知道向量在其中一个方向上的分量,不会告诉你任何关于另一个方向分量的信息。
想象你在描述一个人的外貌:
- "身高"和"体重"不是完全正交的(高的人往往更重)
- "身高"和"眼睛颜色"更接近正交(知道身高不能预测眼睛颜色)
在数据分析中,我们经常希望找到"正交"的特征,因为它们提供的是独立的信息,没有冗余。这正是主成分分析( PCA)的核心思想。
正交集与正交基
正交集的定义
一组向量
例子:三维空间中的标准基
正交集的关键性质:自动线性独立
定理:一个不含零向量的正交集一定是线性独立的。
直觉解释:想象你有三根互相垂直的棍子。你不可能通过组合其中两根来"模拟"第三根——它们指向完全不同的、互不干扰的方向。
证明:假设
由正交性,
因为
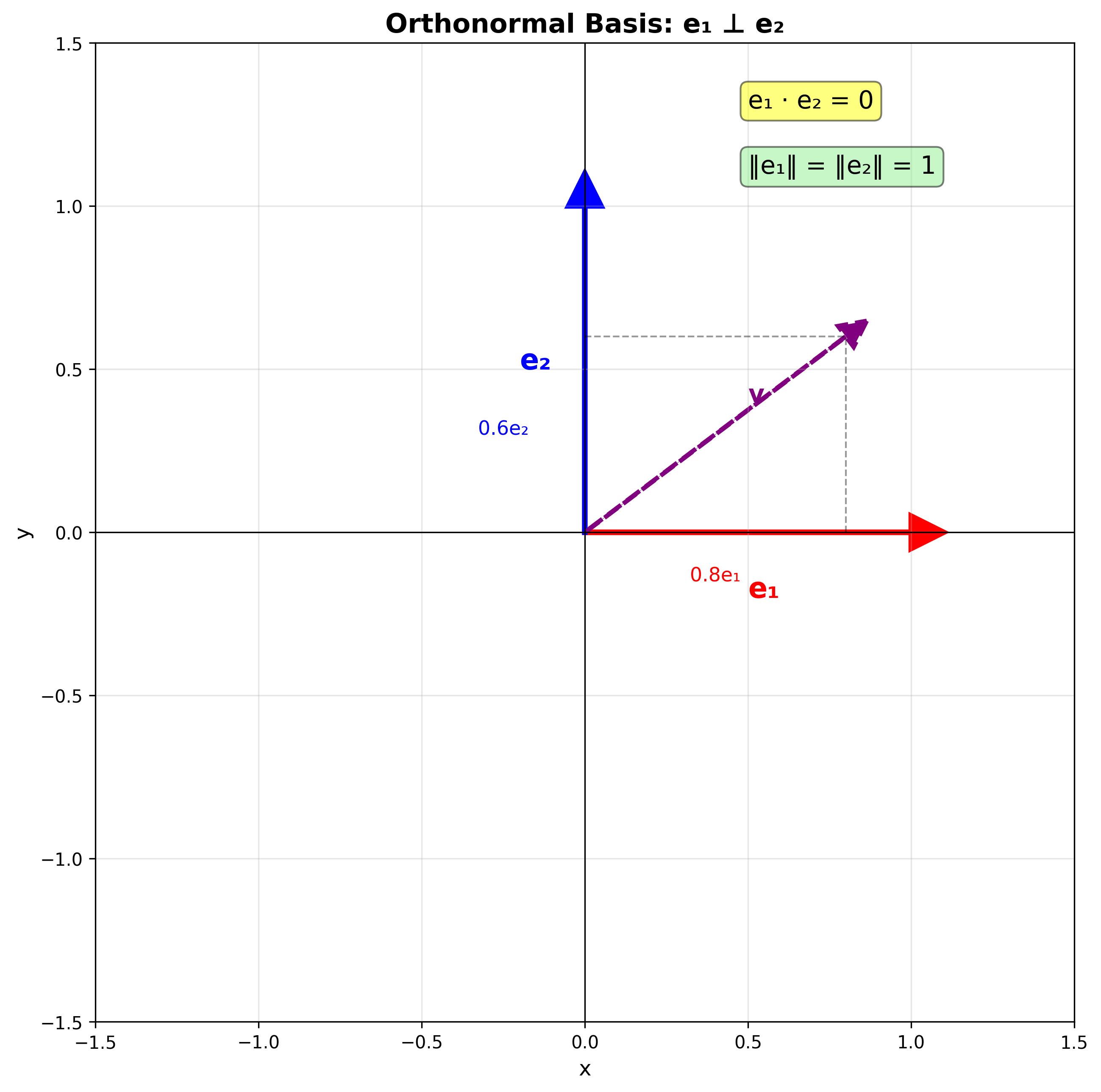
标准正交基
如果正交集中的每个向量都是单位向量(长度为 1),则称为标准正交集( orthonormal set)。
如果标准正交集还张成整个空间(即构成基),则称为标准正交基。
标准正交基的特征:设
这里
正交基的计算优势
为什么我们如此偏爱正交基?因为坐标计算变得极其简单。
一般基的情况:给定基
这通常需要高斯消元,计算量为
正交基的情况:如果基是正交的,坐标可以直接用点积算出:
标准正交基的情况更简单:
计算量仅为
生活类比:用正交基分解向量,就像称量行李的重量——你不需要把所有行李放一起称然后解方程,而是一件一件单独称就行了。
向量投影:找最近的点
一维投影:影子的数学
想象阳光从正上方照下来,一根倾斜的棍子在地面上投下影子。这个"影子"就是棍子在地面方向上的投影。
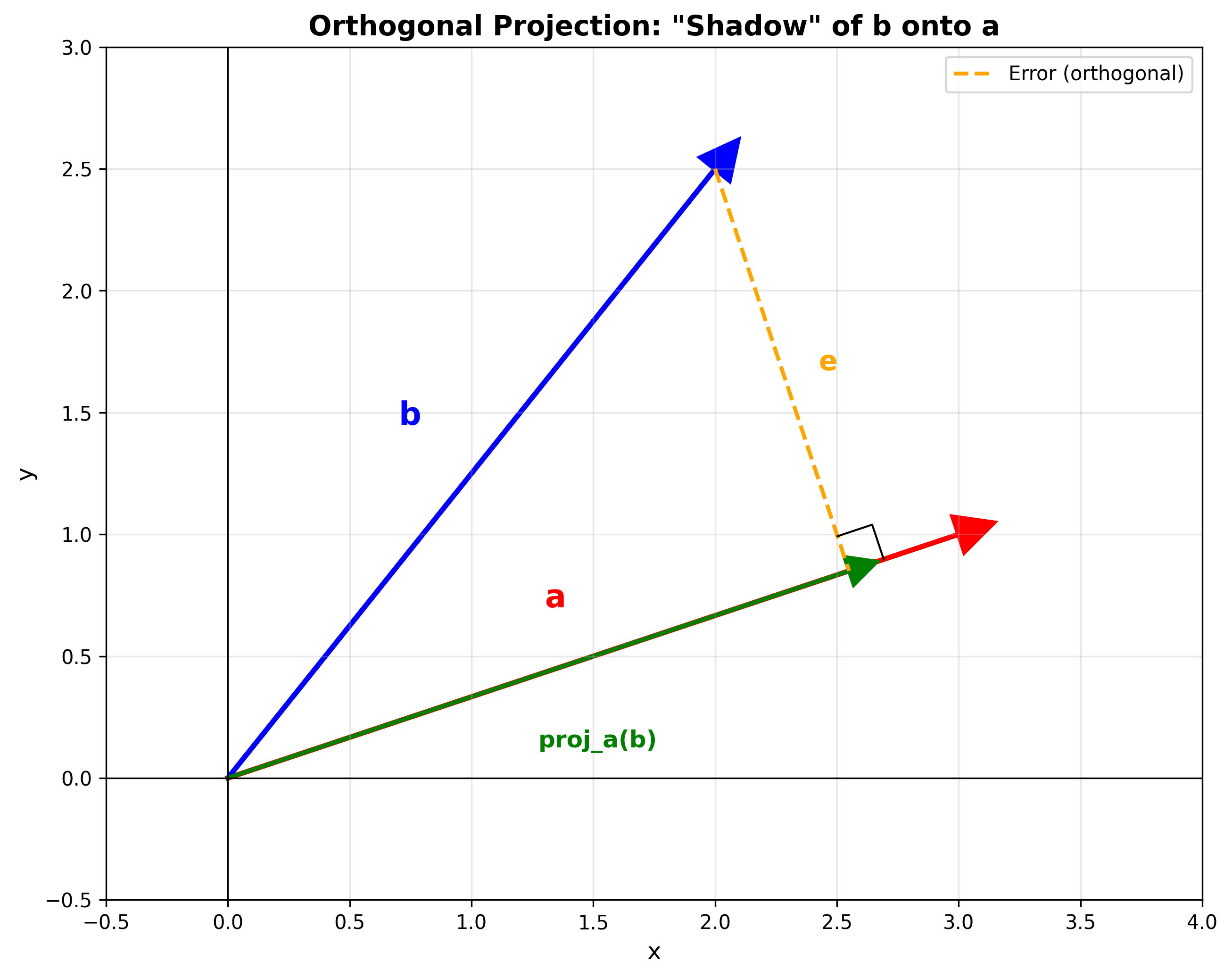
向量
让我们拆解这个公式:
:衡量 在 方向上有多少"分量" : 的长度的平方,用于归一化 :这是一个标量,表示投影的"比例系数" - 乘以
:得到与 同方向的向量
投影的长度(标量投影):
注意:标量投影可以是负数(当
投影的几何本质:最短距离
投影有一个深刻的几何意义:
为什么? 设
现在,取直线上任意另一点
(第二步用了勾股定理,因为
这个表达式在
正交分解
每个向量
记为:
这个分解是唯一的,且两个分量正交。
应用:物理中的力分解。把重力分解为沿斜面方向和垂直斜面方向的分量,就是正交分解的典型应用。
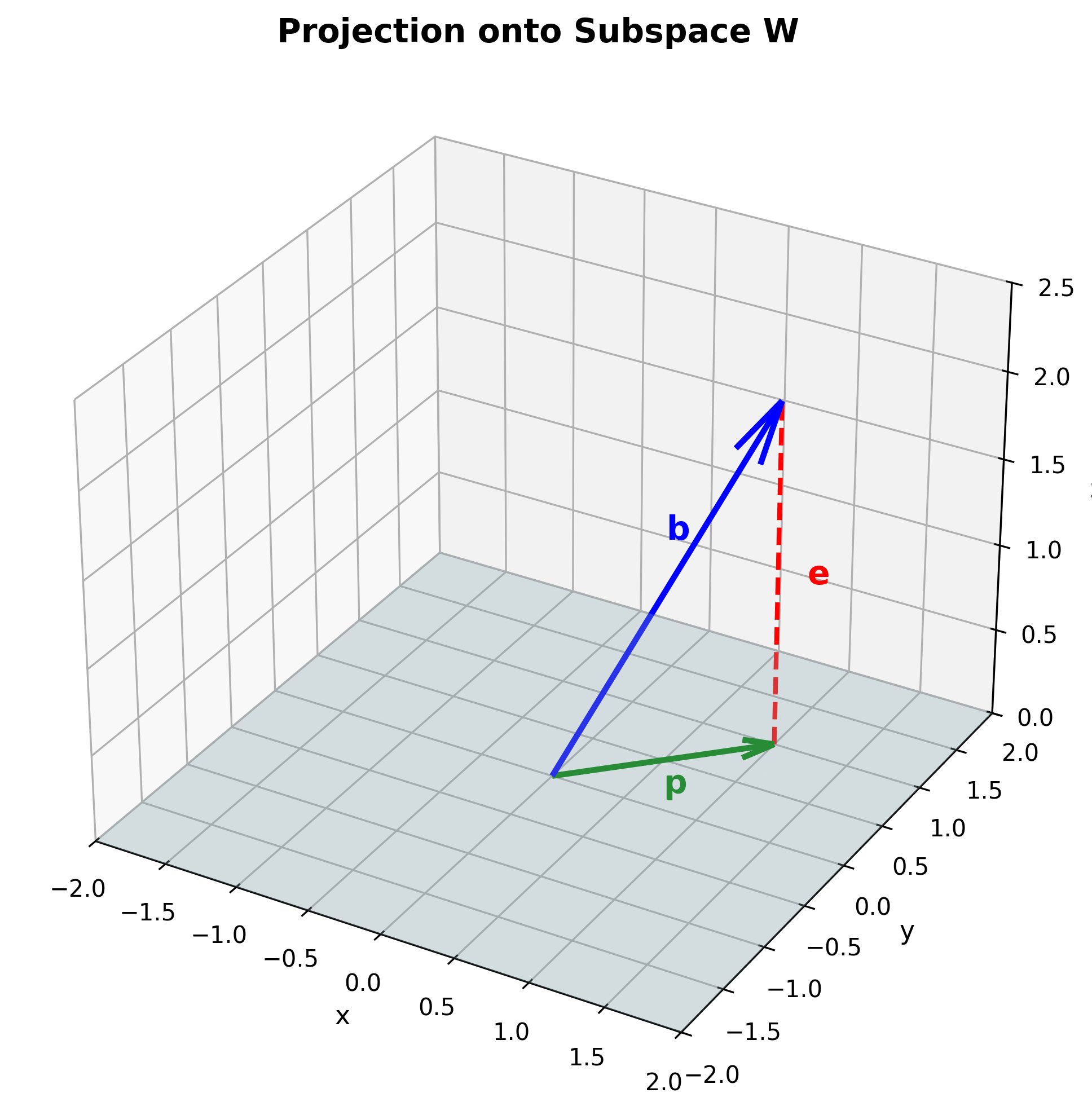
子空间投影:从直线到平面
投影到子空间
如果不是投影到一条直线,而是投影到一个平面或更高维的子空间呢?
设
这意味着误差向量
投影矩阵
当
设
投影矩阵:
投影矩阵的性质:
- 幂等性:
(投影的投影还是自己) - 对称性:
- 秩:
幂等性的直觉:想象你把一个物体的影子再投影一次,影子不会变——它已经在"地面"上了。
正规方程
投影公式
推导:投影的关键条件是
展开得到正规方程
正交补空间
与子空间
正交补收集了所有与
重要性质:
即每个向量都可以唯一分解为
四大子空间的正交关系:
-
Gram-Schmidt 正交化:制造正交基
问题的提出
假设你有一组线性独立的向量,但它们不正交。你能否"调整"它们,使它们变成正交的,同时张成相同的空间?
答案是肯定的,方法就是Gram-Schmidt 正交化。
算法思想
核心思想是逐步去除之前向量的分量。
设原始向量是
步骤:
- 第一个向量:直接取
- 第二个向量:从
中减去它在 上的投影 - 第三个向量:从
中减去它在 和 上的投影 - 一般公式:
- 单位化:如果需要标准正交基,最后将每个向量除以其长度:
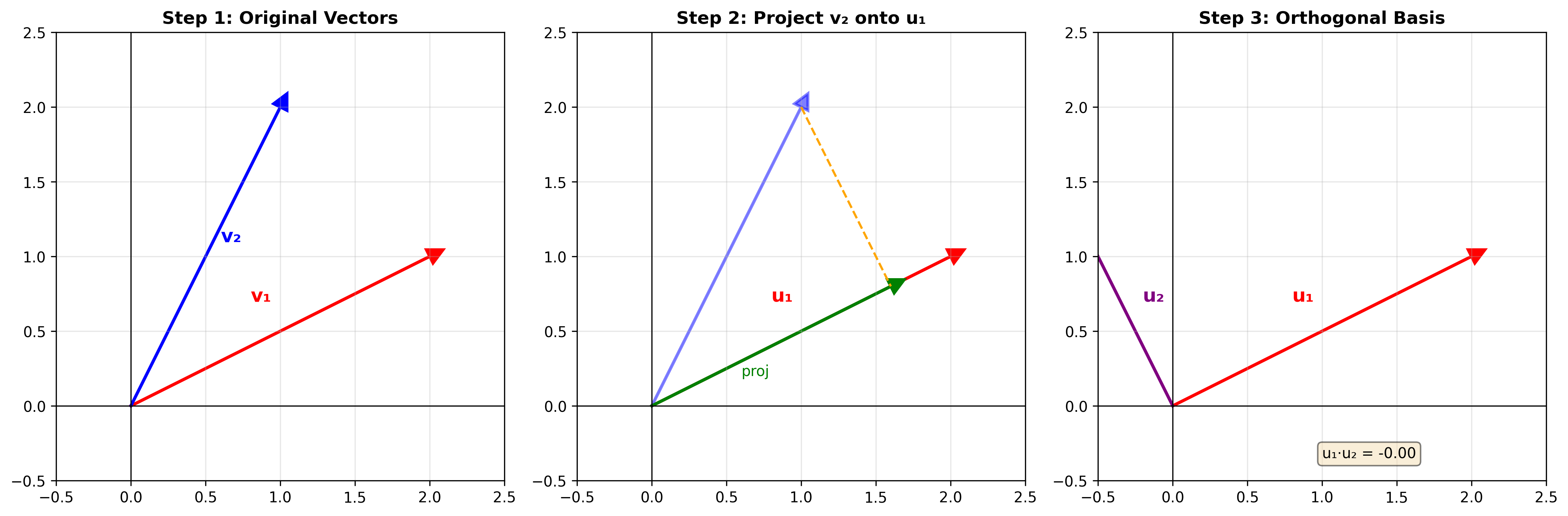
直觉解释
想象你在建造一个正交坐标系:
- 第一根轴:随便选一个方向(
) - 第二根轴:
大致指向第二个方向,但可能不垂直于第一根轴。我们从 中"扣除"它在第一根轴上的分量,剩下的就垂直于第一根轴了 - 第三根轴:
从中扣除在前两根轴上的分量,剩下的就同时垂直于前两根轴
每一步都在"清除"之前方向的"污染",只保留新的、独立的信息。
详细例子
对
第一步:
验证:
第三步:计算
数值稳定性问题
经典 Gram-Schmidt
算法在数值计算中可能累积误差,导致后面的向量不够正交。改进版
Gram-Schmidt( Modified
Gram-Schmidt)在每次投影后立即更新向量,而不是使用原始的
1 | def modified_gram_schmidt(A): |
QR 分解:正交化的矩阵表示
QR 分解的定义
任何列线性独立的
其中:
-
与 Gram-Schmidt 的关系
具体地:
为什么
QR 分解的例子
对矩阵
Gram-Schmidt 正交化后得到(归一化):
QR 分解的应用
最小二乘法的改进:正规方程
由
正规方程变为
这是一个上三角系统,可以用回代法高效求解!
为什么 QR 分解更好? 直接计算
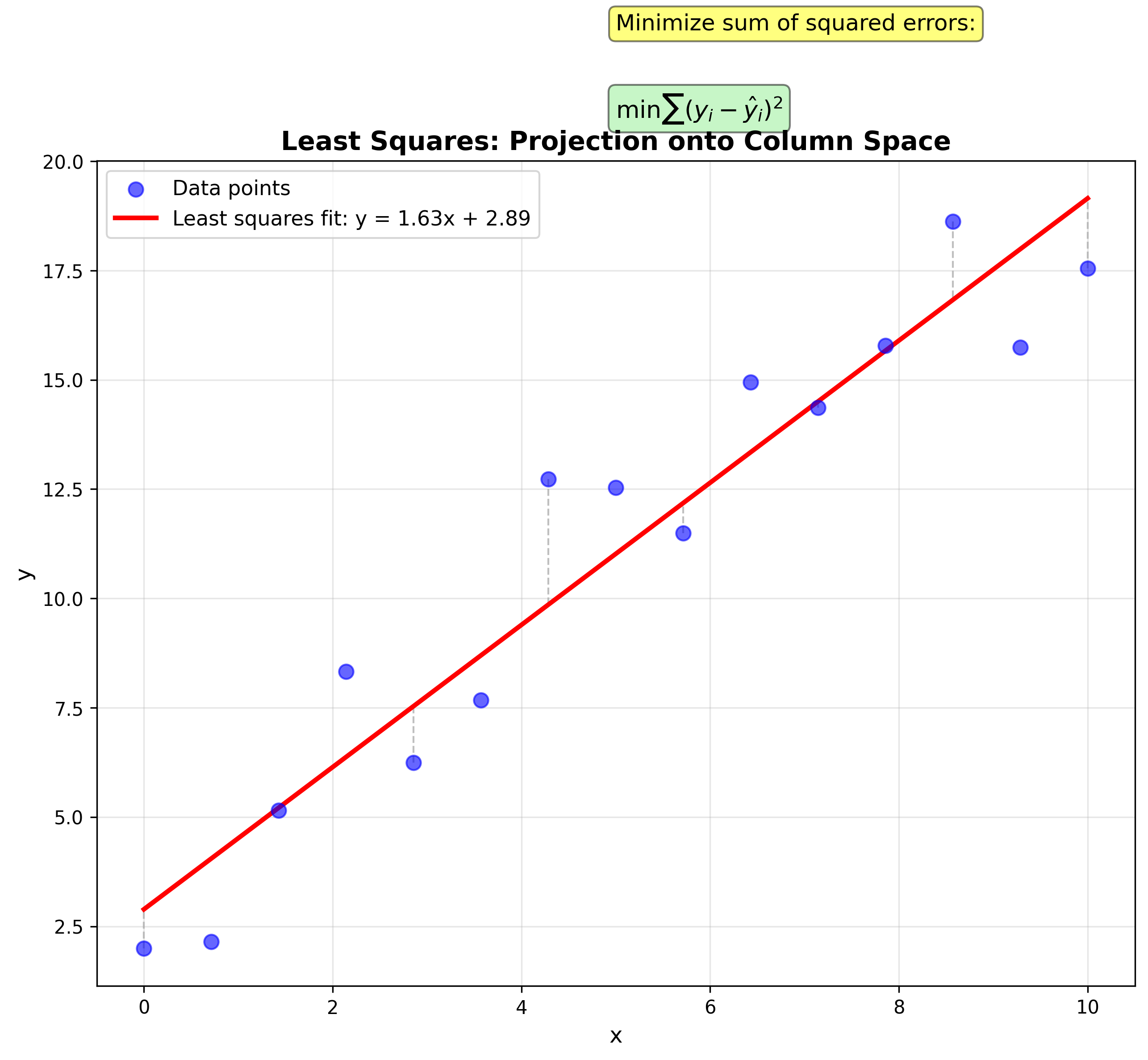
最小二乘法:当方程无解时
问题的提出
现实中,数据往往带有噪声。假设你测量了 5
个数据点,想用一条直线拟合它们。你需要解:
这是 5 个方程 2 个未知数——方程数多于未知数,称为超定系统( overdetermined system)。除非 5 个点恰好共线,否则不存在精确解。
最小二乘解
最小二乘法的思想:既然找不到精确解,就找一个使误差平方和最小的解。
误差向量是
几何解释:
因此,最小二乘解
正规方程的推导
最小二乘解满足正规方程:
推导方法一(几何):投影误差
推导方法二(微积分):令
求梯度并令其为零:
得到相同的正规方程。
线性回归的例子
问题:拟合数据点
构建矩阵:
计算正规方程:
求解:
解得
加权最小二乘法
有时候不同数据点的可靠性不同。加权最小二乘法给每个数据点一个权重
正规方程变为:
其中
正交矩阵:保持距离与角度
定义与性质
方阵
等价地,
列向量的性质:
行向量的性质:
正交矩阵保持几何
正交矩阵是"刚体变换"——它保持长度、角度和方向性(如果
保持长度:
保持内积:
保持角度:因为内积保持,而角度由
正交矩阵的行列式
定理:
因此
-
常见的正交矩阵
二维旋转矩阵:
验证:
二维反射矩阵:沿单位向量
验证:
Householder 反射:是 QR 分解的另一种实现方式,数值稳定性比 Gram-Schmidt 更好。
置换矩阵:每行每列只有一个 1,其余为 0 。例如:
作用是交换向量分量的顺序。
正交矩阵的数值优势
正交矩阵的条件数为 1:
这意味着用正交矩阵做计算是数值稳定的——误差不会被放大。
信号处理中的应用
傅里叶基:最重要的正交基
信号处理的核心工具——傅里叶变换——本质上是在一组正交基下的坐标变换。
考虑周期为
这些向量构成正交基(在复内积下):
离散傅里叶变换( DFT)就是把信号
信号分解与滤波
因为傅里叶基是正交的,信号可以无损分解为不同频率分量:
低通滤波:只保留低频分量(小的
高通滤波:只保留高频分量,提取边缘或突变
带通滤波:只保留特定频率范围
降噪耳机的原理
降噪耳机用麦克风采集外界噪声,然后:
- 对噪声信号做傅里叶变换
- 生成相位相反的信号
- 播放到耳机中
因为正交分量可以独立处理,所以可以"精确抵消"噪声而不影响你听的音乐。
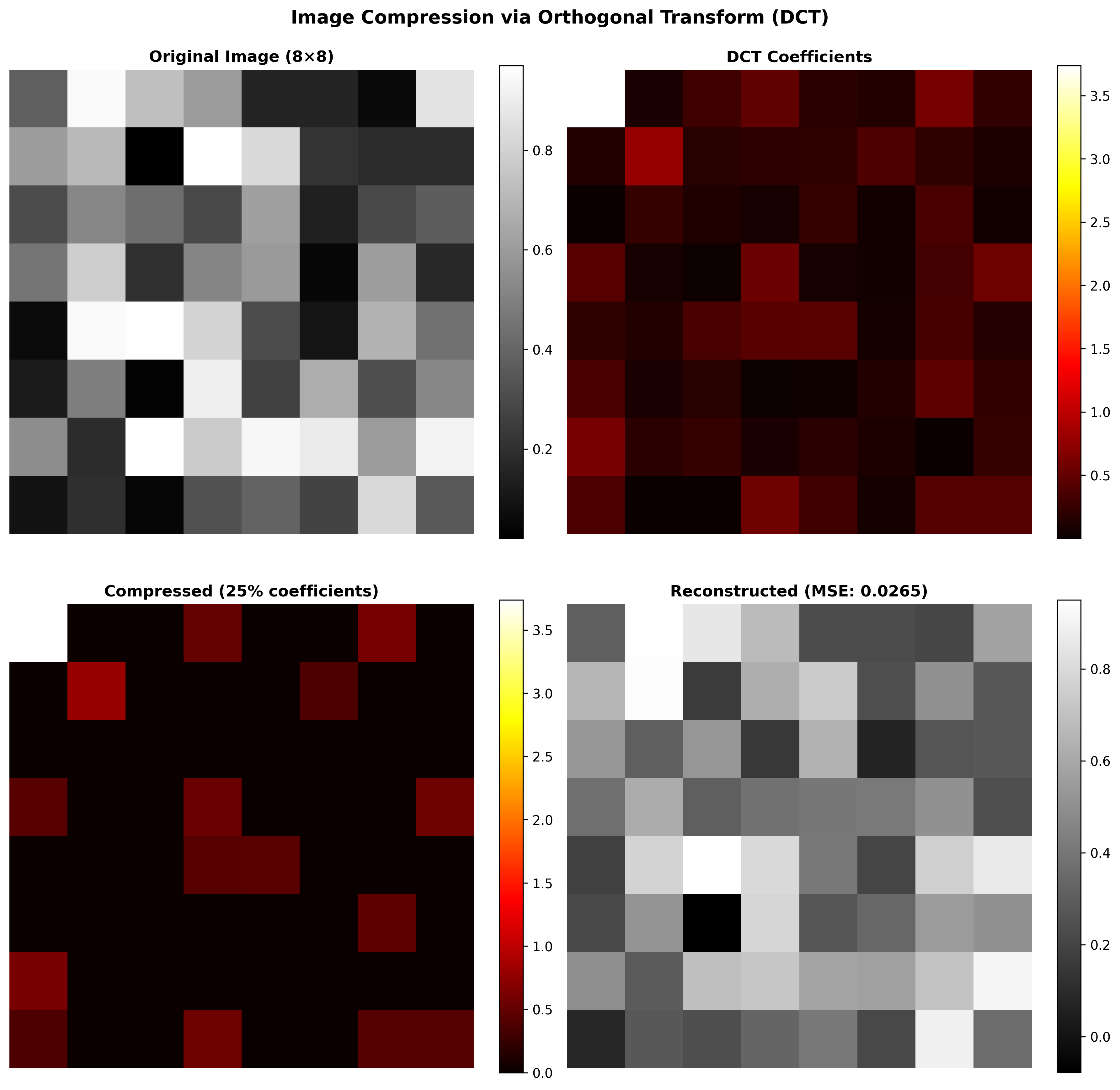
图像压缩: JPEG 中的 DCT
JPEG 图像压缩使用离散余弦变换( DCT),这是傅里叶变换的实数版本。
图像被分成
重建图像时,只需要少数低频分量就能近似原图——这是正交分解的威力。
正交码分多址( CDMA)
手机通信中,多个用户同时使用相同的频率。如何区分不同用户的信号?
CDMA的解决方案:给每个用户分配一个"码",这些码两两正交。
用户 A 的信号:
因为
主成分分析( PCA):找最重要的方向
问题的提出
假设你有一组高维数据(比如 1000 个特征),想用少数几个"主要成分"来描述它。如何找到这些主成分?
PCA 的基本思想
PCA 寻找数据方差最大的方向。
第一主成分:数据在这个方向上的投影方差最大
第二主成分:在与第一主成分正交的方向中,方差最大的
...依此类推
为什么要求正交? 正交保证了主成分之间"互不干扰",每个主成分捕获的是独立的信息。
数学表述
设数据矩阵是
协方差矩阵:
其中
降维
保留前
其中
这是"最优"的线性降维——在
Python 实现示例
Gram-Schmidt 正交化
1 | import numpy as np |
QR 分解
1 | def qr_decomposition(A): |
最小二乘法
1 | def least_squares(A, b): |
投影可视化
1 | import matplotlib.pyplot as plt |
练习题
基础题
习题 1:验证向量
习题 2:计算向量
习题 3:对向量组
习题 4:设
习题 5:旋转矩阵
进阶题
习题 6:证明如果
习题 7:证明投影矩阵
习题 8:对矩阵
习题 9:用最小二乘法拟合数据点
习题 10:设
习题 11:证明两个正交矩阵的乘积仍是正交矩阵。
习题 12:设
应用题
习题 13:某实验测量了 5 组数据
数据:
习题 15:解释为什么 JPEG 图像压缩使用离散余弦变换( DCT)而不是直接存储像素值。正交变换在其中起什么作用?
编程题
习题 16:实现改进版 Gram-Schmidt 算法( Modified Gram-Schmidt),并与经典版本比较数值稳定性。提示:使用接近线性相关的向量测试。
习题 17:用 Python 实现投影矩阵的计算,并可视化向量到平面的投影。
习题 18:实现一个简单的主成分分析( PCA),对二维数据进行降维和可视化。
习题 19:用 QR 分解实现最小二乘法,并与 NumPy 的
np.linalg.lstsq 结果比较。
习题 20:模拟一个简单的 CDMA 系统:
- 生成 3 个正交码(长度为 4)
- 3 个用户分别发送比特 0 或 1
- 模拟接收混合信号
- 用正交性分离每个用户的信号
本章总结
核心概念
正交:
,表示向量"互不干扰" 投影:
- 一维:
- 子空间:
- 一维:
正规方程:
,最小二乘问题的核心 Gram-Schmidt:将任意线性独立向量组变成正交基
QR 分解:
, 正交、 上三角,数值稳定 正交矩阵:
,保持长度和角度
应用领域
| 领域 | 应用 | 使用的概念 |
|---|---|---|
| 数据分析 | 线性回归 | 最小二乘法 |
| 机器学习 | PCA 降维 | 正交分解 |
| 信号处理 | FFT 、滤波 | 正交基 |
| 图像处理 | JPEG 压缩 | DCT 变换 |
| 通信 | CDMA | 正交码 |
| 数值计算 | 解线性方程组 | QR 分解 |
下一章预告
《对称矩阵与二次型》 将探讨:
- 对称矩阵的谱定理
- 实对称矩阵的特征值都是实数
- 正定矩阵的判定与应用
- 二次型的几何意义
- 主轴定理
- 优化问题中的 Hessian 矩阵
参考资料
- Strang, G. (2019). Introduction to Linear Algebra. Chapters 4, 10.
- Trefethen, L. N. & Bau, D. (1997). Numerical Linear Algebra. Lectures 7-11.
- 3Blue1Brown. Essence of Linear Algebra, Chapters 9, 11.
- Golub, G. H. & Van Loan, C. F. (2013). Matrix Computations. Chapter 5.
本文是《线性代数的本质与应用》系列的第 7 章,共 18 章。
- 本文标题:线性代数(七)正交性与投影
- 本文作者:Chen Kai
- 创建时间:2019-02-06 15:30:00
- 本文链接:https://www.chenk.top/%E7%BA%BF%E6%80%A7%E4%BB%A3%E6%95%B0%EF%BC%88%E4%B8%83%EF%BC%89%E6%AD%A3%E4%BA%A4%E6%80%A7%E4%B8%8E%E6%8A%95%E5%BD%B1/
- 版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!