如果说前几章的 Model-Free
方法是"边做边学"——通过大量试错直接优化策略或价值函数,那么 Model-Based
方法则是"先想后做"——通过学习环境的动态模型
Model-Based vs
Model-Free:两条路径的对比
核心差异
Model-Free RL :直接从经验
优点: - 算法简单,易于实现 - 不需要对环境做假设 -
在模型复杂或不可知的任务中表现好
缺点: - 样本效率低——需要百万级交互才能学好 -
难以泛化到新任务——策略只对训练环境有效 -
缺乏可解释性——无法理解智能体为什么这样做
Model-Based RL :显式学习环境模型
优点: - 样本效率高——可以在想象中学习,减少真实交互 -
泛化能力强——模型学到的动态知识可以迁移到新任务 -
可解释性好——可以可视化智能体对世界的理解
缺点: - 模型误差累积——预测误差会随规划步数指数增长 -
计算昂贵——需要训练额外的模型网络,规划也需要计算 -
难以建模复杂环境——高维观测(如像素)的动态模型很难学
样本效率对比
在经典的控制任务中,Model-Based 方法的样本优势明显:
算法类型
环境
达到专家水平所需样本
DQN (Model-Free)
Atari Pong
10M frames
PPO (Model-Free)
MuJoCo HalfCheetah
1M steps
Dreamer (Model-Based)
DMControl Walker
100K steps
MBPO (Model-Based)
MuJoCo HalfCheetah
100K steps
Model-Based 方法通常只需要 Model-Free 方法 1/10 的样本量!
何时使用 Model-Based 方法
适合场景 : - 真实交互成本高(机器人、自动驾驶) -
环境动态相对简单可学(物理模拟器、棋类游戏) -
需要快速适应新任务(迁移学习、元学习) - 需要可解释性和安全保证
不适合场景 : - 环境高度随机(如股票市场) -
观测高维且动态复杂(如复杂 3D 游戏) - 有大量免费模拟器(如
Atari,本身就是模拟器)
Dyna 架构:整合学习与规划
历史背景
Dyna 架构 由 Richard Sutton 在 1990
年提出,是最早系统化的 Model-Based RL
框架。核心思想:交替进行真实经验学习和模拟经验学习 。
Dyna 包含三个核心组件:
直接学习(Direct Learning) :从真实环境收集
模型学习(Model
Learning) :从真实经验学习环境模型
规划(Planning) :用学习的模型生成模拟经验,进一步更新策略/价值函数
Dyna-Q 算法
Dyna-Q 是 Dyna 架构在 Q-Learning 上的实例化:
算法流程 :
初始化 Q 表每 个 时 间 步 真 实 交 互 在 环 境 中 执 行 动 作 观 测 (b)
直接学习 :更新 Q 值(标准 Q-Learning):
(c) 模型学习 :更新模型:(d) 规划 :重复
从已访问的状态-动作对中随机采样
代码实现(表格型 Dyna-Q)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 import numpy as npimport gymclass DynaQ : """Dyna-Q 算法(表格型)""" def __init__ (self, n_states, n_actions, alpha=0.1 , gamma=0.95 , epsilon=0.1 , planning_steps=5 ): self.n_states = n_states self.n_actions = n_actions self.alpha = alpha self.gamma = gamma self.epsilon = epsilon self.planning_steps = planning_steps self.Q = np.zeros((n_states, n_actions)) self.model = {} self.visited = set () def select_action (self, state ): """epsilon-greedy 选择动作""" if np.random.rand() < self.epsilon: return np.random.randint(self.n_actions) return np.argmax(self.Q[state]) def update_q (self, s, a, r, s_next ): """Q-Learning 更新""" target = r + self.gamma * np.max (self.Q[s_next]) self.Q[s, a] += self.alpha * (target - self.Q[s, a]) def learn (self, state, action, reward, next_state ): """Dyna-Q 学习步骤""" self.update_q(state, action, reward, next_state) self.model[(state, action)] = (reward, next_state) self.visited.add((state, action)) for _ in range (self.planning_steps): if not self.visited: break s, a = list (self.visited)[np.random.randint(len (self.visited))] r, s_next = self.model[(s, a)] self.update_q(s, a, r, s_next) def train_dyna_q (env_name='FrozenLake-v1' , episodes=500 ): """训练 Dyna-Q""" env = gym.make(env_name, is_slippery=False ) n_states = env.observation_space.n n_actions = env.action_space.n agent = DynaQ(n_states, n_actions, planning_steps=10 ) rewards_history = [] for episode in range (episodes): state = env.reset() total_reward = 0 done = False while not done: action = agent.select_action(state) next_state, reward, done, _ = env.step(action) agent.learn(state, action, reward, next_state) state = next_state total_reward += reward rewards_history.append(total_reward) if (episode + 1 ) % 50 == 0 : avg_reward = np.mean(rewards_history[-50 :]) print (f"Episode {episode+1 } , Avg Reward: {avg_reward:.2 f} " ) return agent agent = train_dyna_q()
优势与问题
优势 : - 简单直观,易于实现 -
样本效率显著提升——每个真实样本可以通过规划产生
问题 1:模型误差累积
当环境模型
示例 :在 FrozenLake
中,如果模型错误地认为某个状态转移到陷阱的概率是
0,智能体会在规划中高估该状态的价值,导致在真实环境中频繁失败。
问题 2:计算效率
每次真实交互后都要进行
问题 3:分布偏移(Distribution Shift)
规划时采样的状态可能与策略实际访问的状态分布不同,导致浪费计算在不重要的区域。
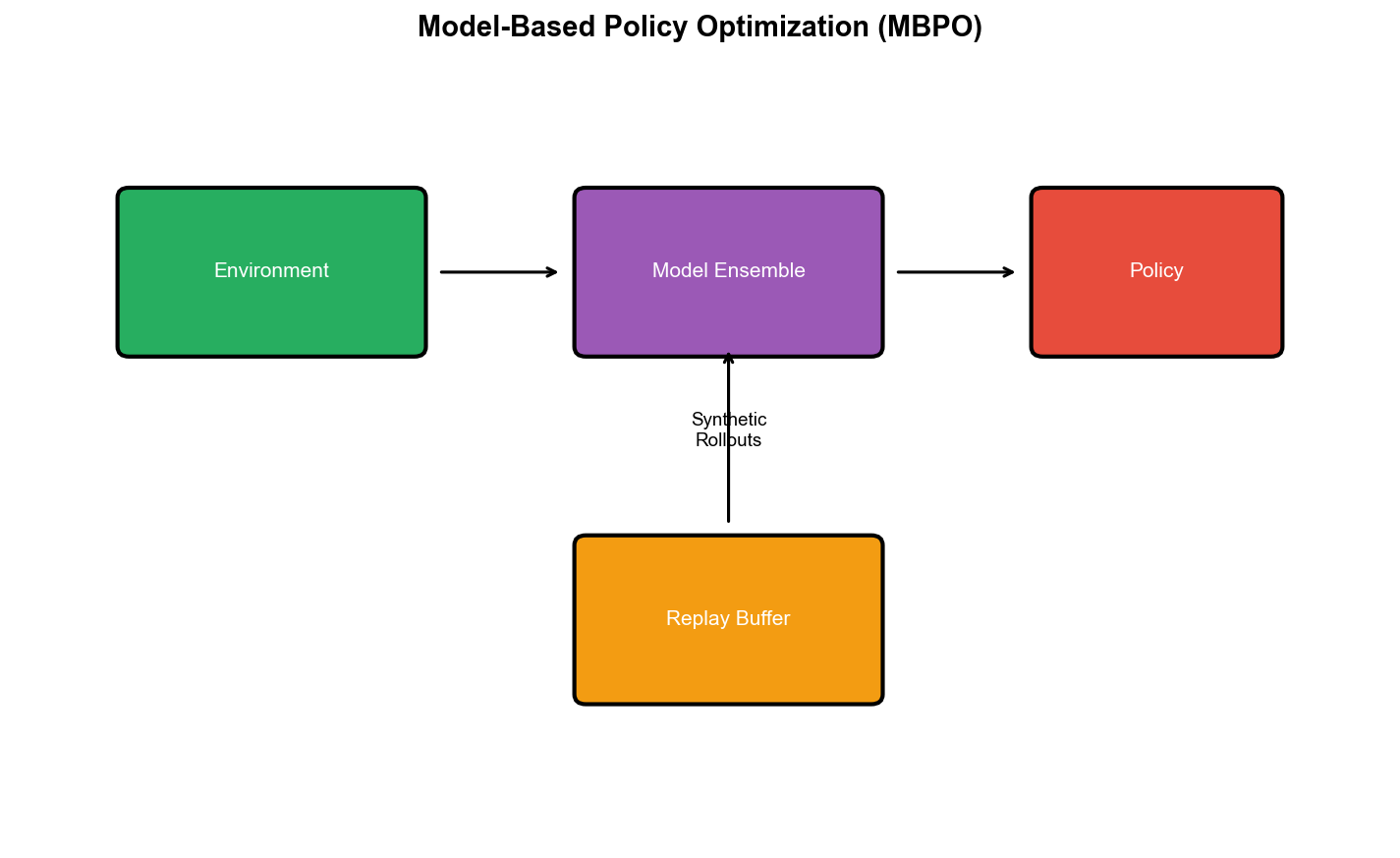
MBPO:通过短视想象缓解模型误差
动机:模型误差的诅咒
在深度 RL 中,环境模型通常是神经网络模型预测误差会随规划长度指数增长 。
假设每步预测的均方误差是
Model-Based Policy Optimization (MBPO) (Janner et
al., NeurIPS
2019)提出了一个简单而有效的解决方案:只在短视想象中规划 。
核心思想
MBPO 的关键洞察: - 长期规划(H=50)容易受模型误差影响 -
短期规划(H=1-5)模型误差可控 - 结合短视模型想象和 Model-Free
优化,可以兼得样本效率和鲁棒性
算法流程 :
收集真实数据 :在环境中执行策略训练动态模型 :用生成虚拟数据 :
从
在模型中展开
将虚拟经验
更新策略 :用 SAC(或其他 Model-Free 算法)在混合
buffer
关键细节 :展开长度
数学分析:为什么短视有效
定义策略的真实回报
其中
这个界告诉我们:折扣因子 。MBPO
通过限制展开长度
完整代码实现
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 import torchimport torch.nn as nnimport torch.nn.functional as Fimport numpy as npfrom collections import dequeclass EnsembleDynamicsModel (nn.Module): """集成动态模型(预测下一状态和奖励)""" def __init__ (self, state_dim, action_dim, hidden_dim=256 , n_models=5 ): super ().__init__() self.n_models = n_models self.models = nn.ModuleList([ nn.Sequential( nn.Linear(state_dim + action_dim, hidden_dim), nn.ReLU(), nn.Linear(hidden_dim, hidden_dim), nn.ReLU(), nn.Linear(hidden_dim, state_dim + 1 ) ) for _ in range (n_models) ]) def forward (self, state, action ): """ 返回每个模型的预测 state: (B, state_dim) action: (B, action_dim) 返回: (n_models, B, state_dim+1) """ x = torch.cat([state, action], dim=-1 ) preds = torch.stack([model(x) for model in self.models]) return preds def predict (self, state, action ): """随机选择一个模型预测(用于展开)""" with torch.no_grad(): preds = self.forward(state, action) idx = np.random.randint(self.n_models) pred = preds[idx] delta_state = pred[:, :-1 ] reward = pred[:, -1 :] next_state = state + delta_state return next_state, reward def train_model (self, replay_buffer, batch_size=256 , epochs=5 ): """训练动态模型""" optimizer = torch.optim.Adam(self.parameters(), lr=1e-3 ) for epoch in range (epochs): batch = replay_buffer.sample(batch_size) states, actions, rewards, next_states, _ = batch delta_states = next_states - states targets = torch.cat([delta_states, rewards.unsqueeze(1 )], dim=-1 ) preds = self.forward(states, actions) losses = [] for i in range (self.n_models): loss = F.mse_loss(preds[i], targets) losses.append(loss) total_loss = sum (losses) optimizer.zero_grad() total_loss.backward() optimizer.step() return total_loss.item() class MBPO : """Model-Based Policy Optimization""" def __init__ (self, env, state_dim, action_dim, rollout_length=5 ): self.env = env self.state_dim = state_dim self.action_dim = action_dim self.rollout_length = rollout_length self.env_buffer = ReplayBuffer(state_dim, action_dim, max_size=1_000_000 ) self.model_buffer = ReplayBuffer(state_dim, action_dim, max_size=1_000_000 ) self.dynamics_model = EnsembleDynamicsModel(state_dim, action_dim) self.policy = SAC(state_dim, action_dim) def collect_real_data (self, n_steps=1000 ): """收集真实环境数据""" state = self.env.reset() for _ in range (n_steps): action = self.policy.select_action(state) next_state, reward, done, _ = self.env.step(action) self.env_buffer.add(state, action, reward, next_state, done) state = next_state if not done else self.env.reset() def generate_virtual_data (self, n_rollouts=1000 ): """用模型生成虚拟数据""" self.model_buffer.clear() for _ in range (n_rollouts): states, _, _, _, _ = self.env_buffer.sample(1 ) state = states[0 ] for _ in range (self.rollout_length): action = self.policy.select_action(state.cpu().numpy()) action_tensor = torch.FloatTensor(action).unsqueeze(0 ) next_state, reward = self.dynamics_model.predict(state.unsqueeze(0 ), action_tensor) self.model_buffer.add( state.cpu().numpy(), action, reward.item(), next_state.squeeze(0 ).cpu().numpy(), False ) state = next_state.squeeze(0 ) def train (self, total_steps=100_000 ): """MBPO 训练循环""" self.collect_real_data(n_steps=5000 ) for step in range (total_steps): self.collect_real_data(n_steps=100 ) if step % 250 == 0 : model_loss = self.dynamics_model.train_model(self.env_buffer) print (f"Step {step} , Model Loss: {model_loss:.4 f} " ) self.generate_virtual_data(n_rollouts=1000 ) for _ in range (20 ): real_batch = self.env_buffer.sample(128 ) model_batch = self.model_buffer.sample(128 ) self.policy.train_step(real_batch) self.policy.train_step(model_batch) if step % 1000 == 0 : eval_reward = self.evaluate() print (f"Step {step} , Eval Reward: {eval_reward:.2 f} " ) def evaluate (self, n_episodes=10 ): """评估策略""" total_rewards = [] for _ in range (n_episodes): state = self.env.reset() episode_reward = 0 done = False while not done: action = self.policy.select_action(state, deterministic=True ) state, reward, done, _ = self.env.step(action) episode_reward += reward total_rewards.append(episode_reward) return np.mean(total_rewards)
实验效果
Janner et al.的论文显示,MBPO 在 MuJoCo 连续控制任务上取得了突破:
HalfCheetah :100K 步达到 10000 分(SAC 需要 1M
步)Hopper :100K 步达到 3000 分,样本效率是 SAC 的 10
倍Humanoid :首次在 100K 步内学会站立行走
关键发现:
展开长度
集成模型(5 个网络取平均)显著提升鲁棒性
虚拟数据和真实数据的混合比例是 4:1 最佳
论文链接 :arXiv:1906.08253
World
Models:在压缩的潜在空间中梦境
动机:像素空间的模型学习困境
MBPO 在低维状态空间(如 MuJoCo 的关节角度)表现优异,但在高维观测(如
Atari 的
World Models (Ha & Schmidhuber, NeurIPS
2018)提出了一个优雅的解决方案:不在原始像素空间建模,而在压缩的潜在空间中学习动态 。
核心架构
World Models 包含三个核心组件:
1. Vision 模块(V):变分自编码器(VAE)
将高维观测
2. Memory 模块(M):循环神经网络(RNN/LSTM)
在潜在空间预测下一个状态:
其中
3. Controller 模块(C):策略网络
从潜在状态选择动作:
训练流程
阶段 1:数据收集
用随机策略在环境中收集轨迹
阶段 2:训练 V 模块
用所有观测训练 VAE,学习压缩表示
阶段 3:训练 M 模块
用编码后的轨迹
阶段 4:训练 C 模块
在"梦境"中训练策略——完全在学习的模型
其中轨迹
代码实现(简化版)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 import torchimport torch.nn as nnimport torch.nn.functional as Fclass VAE (nn.Module): """变分自编码器""" def __init__ (self, obs_channels=3 , latent_dim=32 ): super ().__init__() self.encoder = nn.Sequential( nn.Conv2d(obs_channels, 32 , 4 , stride=2 , padding=1 ), nn.ReLU(), nn.Conv2d(32 , 64 , 4 , stride=2 , padding=1 ), nn.ReLU(), nn.Conv2d(64 , 128 , 4 , stride=2 , padding=1 ), nn.ReLU(), nn.Conv2d(128 , 256 , 4 , stride=2 , padding=1 ), nn.ReLU(), nn.Flatten() ) self.fc_mu = nn.Linear(256 * 4 * 4 , latent_dim) self.fc_logvar = nn.Linear(256 * 4 * 4 , latent_dim) self.fc_decode = nn.Linear(latent_dim, 256 * 4 * 4 ) self.decoder = nn.Sequential( nn.ConvTranspose2d(256 , 128 , 4 , stride=2 , padding=1 ), nn.ReLU(), nn.ConvTranspose2d(128 , 64 , 4 , stride=2 , padding=1 ), nn.ReLU(), nn.ConvTranspose2d(64 , 32 , 4 , stride=2 , padding=1 ), nn.ReLU(), nn.ConvTranspose2d(32 , obs_channels, 4 , stride=2 , padding=1 ), nn.Sigmoid() ) def encode (self, x ): """编码到潜在分布""" h = self.encoder(x) mu = self.fc_mu(h) logvar = self.fc_logvar(h) return mu, logvar def reparameterize (self, mu, logvar ): """重参数化技巧""" std = torch.exp(0.5 * logvar) eps = torch.randn_like(std) return mu + eps * std def decode (self, z ): """解码到图像""" h = self.fc_decode(z) h = h.view(-1 , 256 , 4 , 4 ) return self.decoder(h) def forward (self, x ): mu, logvar = self.encode(x) z = self.reparameterize(mu, logvar) recon = self.decode(z) return recon, mu, logvar def loss_function (self, recon, x, mu, logvar ): """VAE 损失(重构+KL 散度)""" recon_loss = F.mse_loss(recon, x, reduction='sum' ) kl_loss = -0.5 * torch.sum (1 + logvar - mu.pow (2 ) - logvar.exp()) return recon_loss + kl_loss class MDNRNN (nn.Module): """混合密度网络 RNN""" def __init__ (self, latent_dim, action_dim, hidden_dim=256 , n_gaussians=5 ): super ().__init__() self.hidden_dim = hidden_dim self.n_gaussians = n_gaussians self.lstm = nn.LSTM(latent_dim + action_dim, hidden_dim, batch_first=True ) self.mdn_mu = nn.Linear(hidden_dim, latent_dim * n_gaussians) self.mdn_sigma = nn.Linear(hidden_dim, latent_dim * n_gaussians) self.mdn_pi = nn.Linear(hidden_dim, n_gaussians) def forward (self, z, a, h=None ): """ 预测下一个潜在状态的分布 z: (B, T, latent_dim) a: (B, T, action_dim) h: 隐状态(可选) """ x = torch.cat([z, a], dim=-1 ) lstm_out, h_next = self.lstm(x, h) mu = self.mdn_mu(lstm_out) sigma = torch.exp(self.mdn_sigma(lstm_out)) pi = F.softmax(self.mdn_pi(lstm_out), dim=-1 ) return mu, sigma, pi, h_next def sample (self, mu, sigma, pi ): """从混合高斯分布采样""" k = torch.multinomial(pi, 1 ).squeeze(-1 ) mu_k = mu.gather(-1 , k.unsqueeze(-1 ).expand(-1 , -1 , mu.size(-1 ) // self.n_gaussians)) sigma_k = sigma.gather(-1 , k.unsqueeze(-1 ).expand(-1 , -1 , sigma.size(-1 ) // self.n_gaussians)) z_next = mu_k + sigma_k * torch.randn_like(mu_k) return z_next class Controller (nn.Module): """简单的线性策略""" def __init__ (self, latent_dim, hidden_dim, action_dim ): super ().__init__() self.fc = nn.Linear(latent_dim + hidden_dim, action_dim) def forward (self, z, h ): """输出动作""" x = torch.cat([z, h], dim=-1 ) return torch.tanh(self.fc(x)) def train_world_models (env, episodes=1000 ): """训练 World Models""" print ("Collecting data..." ) trajectories = collect_random_trajectories(env, episodes) print ("Training VAE..." ) vae = VAE() optimizer_vae = torch.optim.Adam(vae.parameters(), lr=1e-4 ) for epoch in range (50 ): total_loss = 0 for obs_batch in get_obs_batches(trajectories): recon, mu, logvar = vae(obs_batch) loss = vae.loss_function(recon, obs_batch, mu, logvar) optimizer_vae.zero_grad() loss.backward() optimizer_vae.step() total_loss += loss.item() print (f"VAE Epoch {epoch} , Loss: {total_loss:.2 f} " ) print ("Encoding observations..." ) latent_trajectories = encode_trajectories(vae, trajectories) print ("Training MDN-RNN..." ) mdn_rnn = MDNRNN(latent_dim=32 , action_dim=env.action_space.shape[0 ]) optimizer_rnn = torch.optim.Adam(mdn_rnn.parameters(), lr=1e-3 ) for epoch in range (50 ): total_loss = 0 for z_seq, a_seq in get_latent_batches(latent_trajectories): mu, sigma, pi, _ = mdn_rnn(z_seq[:, :-1 ], a_seq[:, :-1 ]) loss = mdn_nll_loss(z_seq[:, 1 :], mu, sigma, pi) optimizer_rnn.zero_grad() loss.backward() optimizer_rnn.step() total_loss += loss.item() print (f"RNN Epoch {epoch} , Loss: {total_loss:.2 f} " ) print ("Training Controller in dream..." ) controller = Controller(latent_dim=32 , hidden_dim=256 , action_dim=env.action_space.shape[0 ]) return vae, mdn_rnn, controller
实验效果
Ha & Schmidhuber 在 CarRacing 游戏上展示了 World Models
的强大能力:
Controller 只有 867 个参数(vs DQN 的 170 万)
在模型中训练 10000 个虚拟 episode,完全不与真实环境交互
达到 900+分(接近人类水平)
可视化显示模型学会了预测赛道、背景和车辆行为
更令人震撼的是:即使在有视觉故障的环境中,智能体也能依靠内部模型完成任务 ——展示了世界模型的鲁棒性。
论文链接 :arXiv:1803.10122
Dreamer:在潜在空间中端到端学习
从 World Models 到 Dreamer
World Models 的一个局限是分阶段训练 :先训练
VAE,再训练 RNN,最后训练 Controller,每个阶段独立优化。这导致: - VAE
可能学到的表示不适合做规划 - RNN 的预测误差无法反向传播到 VAE 改进表示 -
需要手动调节各阶段的超参数
Dream to Control (Dreamer) (Hafner et al., ICLR
2020)提出端到端训练 的世界模型:所有组件(表示、动态、策略)联合优化,在潜在空间的"梦境"中直接学习策略。
Dreamer 架构
Dreamer 包含四个核心组件:
1. 表示模型(Representation Model)
从观测和历史推断潜在状态:
其中
2. 过渡模型(Transition Model)
在潜在空间预测未来:
3. 观测模型(Observation Model)
解码潜在状态到观测:
4. 奖励模型(Reward Model)
预测奖励:
训练目标
Dreamer 同时优化三个目标:
1. 表示学习损失
这个损失同时训练: - 观测重构(第一项) - 奖励预测(第二项) -
过渡模型和表示的一致性(KL 项)
2. 行为学习损失(在梦境中优化策略)
在潜在空间展开
其中
3. 价值学习损失
训练价值函数
完整算法流程
1 2 3 4 5 6 7 8 9 10 11 12 1. 初始化所有模块参数 2. 收集初始数据到 replay buffer 3. Loop: a. 从 buffer 采样序列数据 b. 通过表示模型编码潜在状态 (h, z) c. 更新世界模型(表示学习损失) d. 在梦境中展开 H 步: - 用过渡模型预测未来潜在状态 - 用奖励模型预测奖励 - 计算回报 e. 更新策略(actor loss)和价值函数(critic loss) f. 在真实环境中执行策略,收集新数据
代码框架(简化)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 import torchimport torch.nn as nnclass Dreamer : """Dreamer 算法""" def __init__ (self, obs_shape, action_dim, hidden_dim=200 , latent_dim=30 ): self.encoder = Encoder(obs_shape, latent_dim) self.rnn = nn.GRUCell(latent_dim + action_dim, hidden_dim) self.posterior = nn.Linear(hidden_dim, latent_dim * 2 ) self.prior = nn.Linear(hidden_dim, latent_dim * 2 ) self.decoder = Decoder(latent_dim + hidden_dim, obs_shape) self.reward_model = nn.Linear(latent_dim + hidden_dim, 1 ) self.actor = nn.Linear(latent_dim + hidden_dim, action_dim) self.critic = nn.Linear(latent_dim + hidden_dim, 1 ) def encode_obs (self, obs, h_prev, z_prev, action ): """表示学习:编码观测到潜在状态""" h = self.rnn(torch.cat([z_prev, action], dim=-1 ), h_prev) obs_feat = self.encoder(obs) post_params = self.posterior(torch.cat([h, obs_feat], dim=-1 )) post_mu, post_std = torch.chunk(post_params, 2 , dim=-1 ) post_std = F.softplus(post_std) z = post_mu + post_std * torch.randn_like(post_mu) prior_params = self.prior(h) prior_mu, prior_std = torch.chunk(prior_params, 2 , dim=-1 ) prior_std = F.softplus(prior_std) return h, z, (post_mu, post_std, prior_mu, prior_std) def imagine_trajectory (self, h, z, horizon=15 ): """在梦境中展开轨迹""" states = [] actions = [] rewards = [] for _ in range (horizon): state = torch.cat([h, z], dim=-1 ) action = torch.tanh(self.actor(state)) h = self.rnn(torch.cat([z, action], dim=-1 ), h) prior_params = self.prior(h) prior_mu, prior_std = torch.chunk(prior_params, 2 , dim=-1 ) prior_std = F.softplus(prior_std) z = prior_mu + prior_std * torch.randn_like(prior_mu) reward = self.reward_model(torch.cat([h, z], dim=-1 )) states.append(state) actions.append(action) rewards.append(reward) return states, actions, rewards def update (self, batch ): """单步更新""" obs_seq, action_seq, reward_seq = batch T = obs_seq.size(1 ) h = torch.zeros(obs_seq.size(0 ), 200 ) z = torch.zeros(obs_seq.size(0 ), 30 ) recon_loss = 0 reward_loss = 0 kl_loss = 0 for t in range (T): h, z, (post_mu, post_std, prior_mu, prior_std) = self.encode_obs( obs_seq[:, t], h, z, action_seq[:, t] ) recon = self.decoder(torch.cat([h, z], dim=-1 )) recon_loss += F.mse_loss(recon, obs_seq[:, t]) pred_reward = self.reward_model(torch.cat([h, z], dim=-1 )) reward_loss += F.mse_loss(pred_reward, reward_seq[:, t]) kl = self.kl_divergence(post_mu, post_std, prior_mu, prior_std) kl_loss += kl.mean() world_model_loss = recon_loss + reward_loss + 0.1 * kl_loss with torch.no_grad(): h_start = h.detach() z_start = z.detach() states, actions, rewards = self.imagine_trajectory(h_start, z_start, horizon=15 ) returns = self.compute_lambda_return(states, rewards, gamma=0.99 , lam=0.95 ) values = torch.stack([self.critic(s) for s in states]) actor_loss = -(returns.detach() - values.detach()).mean() critic_loss = F.mse_loss(values.squeeze(), returns.detach()) total_loss = world_model_loss + actor_loss + critic_loss return total_loss def kl_divergence (self, mu1, std1, mu2, std2 ): """两个高斯分布的 KL 散度""" return torch.log(std2 / std1) + (std1**2 + (mu1 - mu2)**2 ) / (2 * std2**2 ) - 0.5 def compute_lambda_return (self, states, rewards, gamma=0.99 , lam=0.95 ): """计算 lambda-return(TD(lambda))""" values = torch.stack([self.critic(s) for s in states]).squeeze() rewards = torch.stack(rewards).squeeze() returns = [] g = 0 for t in reversed (range (len (rewards))): delta = rewards[t] + gamma * (values[t+1 ] if t+1 < len (values) else 0 ) - values[t] g = delta + gamma * lam * g returns.insert(0 , g + values[t]) return torch.stack(returns)
实验效果
Dreamer 在 DMControl 和 Atari 任务上取得了 SOTA 结果:
DMControl Walker :100K 步达到 900 分(SAC 需要 1M
步)Atari Breakout :200K 步达到 400 分,样本效率是
Rainbow 的 5 倍连续 20 个任务平均 :超越所有 baseline(包括 D4PG 、
SAC 、 PlaNet)
关键发现:
端到端训练的表示质量显著优于分阶段训练
在梦境中展开 15 步最优(平衡模型误差和长期规划)
KL 正则化至关重要——防止过拟合和模式崩溃
论文链接 :arXiv:1912.01603
后续版本DreamerV2 (2021)和DreamerV3 (2023)进一步改进,DreamerV3
在 Minecraft 等开放世界游戏中取得突破,展示了世界模型的巨大潜力。
MuZero:无需显式模型的规划
动机:为什么不需要完美重构
之前的方法(World Models 、
Dreamer)都试图学习能重构观测的模型——即预测
DeepMind
提出:只需要预测与决策相关的信息 (如价值、策略、奖励),而不是完整的观测。
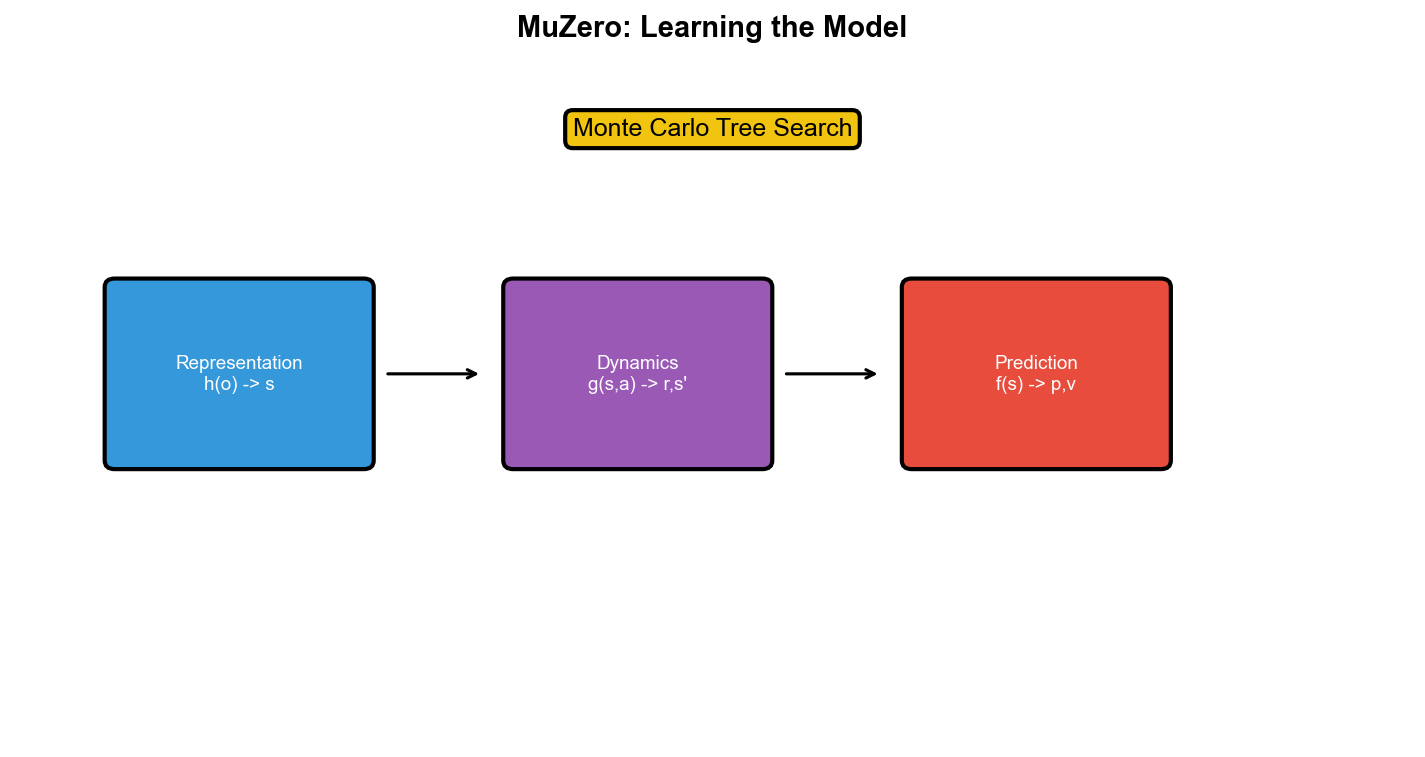
MuZero (Schrittwieser et al., Nature
2020)实现了这个想法:学习一个隐式模型,它不预测观测,只预测价值、策略和奖励——这些是
MCTS 规划所需的全部信息。
核心架构
MuZero 包含三个网络:
1. 表示网络(Representation Function)
将观测编码到隐藏状态:
注意:
2. 动态网络(Dynamics Function)
预测下一个隐藏状态和奖励:
同样,
3. 预测网络(Prediction Function)
预测策略和价值:
其中
训练目标
MuZero 通过 MCTS
在隐藏状态空间中规划,然后用自对弈数据训练。损失函数包含三项:
其中: -
关键洞察 :模型不需要预测观测,只需要预测 MCTS
所需的
与 AlphaZero 的对比
特性
AlphaZero
MuZero
环境模型
需要完美模拟器(如围棋规则)
从数据学习隐式模型
状态表示
显式物理状态
抽象隐藏状态
适用范围
仅限规则已知的游戏
任何环境(包括 Atari)
样本效率
无限模拟
需要真实交互
实验效果
MuZero 在多个领域取得突破:
围棋 :与 AlphaZero 相当(ELO ~5000)国际象棋 :略逊于 Stockfish 但远超人类Atari 57 游戏 :平均得分超过
R2D2,在一半游戏上达到人类水平DMControl :100K 步超越 Dreamer
最震撼的是:同一个算法,同样的超参数,在完全不同类型的任务(棋类、
Atari 、连续控制)上都取得 SOTA ——展示了通用性。
论文链接 :arXiv:1911.08265
理论分析与开放问题
Q&A: Model-Based RL
常见问题
Q1: 为什么模型误差会累积?
A: 假设单步预测误差是
Q2: 如何评估模型质量?
A:
不能只看重构误差(MSE)!更重要的是:模型预测的轨迹是否导致好的决策 。可以用:
- 策略评估差异 :规划质量 :在模型中规划的策略在真实环境的表现 -
动态一致性 :长期轨迹的分布是否匹配
Q3: Model-Based 能用于部分可观测环境吗?
A: 可以!Dreamer 就是例子——它用 RNN 的隐状态
Q4: 如何缓解模型误差?
A: 几种方法:
短视规划 (MBPO):只展开 1-5 步集成模型 :训练多个模型,取平均或随机采样不确定性估计 :用贝叶斯神经网络或 Dropout
估计预测不确定性,避免在不确定区域规划模型正则化 :惩罚过于自信的预测
Q5: Dyna 、 MBPO 、 Dreamer 有什么区别?
A: - Dyna :表格型,模型完美记录转移,适合小环境 -
MBPO :学习状态空间的神经网络模型,短视展开,结合 SAC -
Dreamer :学习潜在空间的模型,长期展开,端到端训练
共同点:都是"用模型生成数据,用 Model-Free 算法学策略"的框架。
Q6: 为什么 MuZero 不重构观测?
A: 重构高维观测(像素)很难,且很多细节与决策无关(如背景颜色)。 MuZero
只预测决策需要的信息
Q7: Model-Based 能迁移到新任务吗?
A:
理论上可以,但实际很难。如果新任务的动态不同(如从走路迁移到跑步),模型需要重新训练或微调。元学习(Meta-Learning)和任务条件模型(Conditional
Models)是活跃的研究方向。
Q8: 在哪些任务上 Model-Free 更好?
A: - 环境有便宜的模拟器(如 Atari 、 Go) -
动态极其复杂(如社交互动、股市) - 需要绝对最优性能(Model-Based
的模型误差可能限制上限)
Q9: Dreamer 的"梦境"是什么?
A:
梦境是指在学习的潜在空间模型中展开的想象轨迹。智能体不与真实环境交互,而是:
从当前潜在状态
用策略选动作$a_t用 模 型 预 测
用这些经验更新策略
类比人类做白日梦:在脑中模拟未来可能发生的事,从中学习而不需要真正经历。
Q10: 未来 Model-Based RL 的研究方向?
A: -
可组合世界模型 :学习可重用的模块(如"物体"、"物理规律"),组合到新场景
- 因果世界模型 :不仅预测"会发生什么",还理解"为什么发生"
- 终身学习 :持续更新模型,适应动态变化的环境 -
安全规划 :在模型中验证策略的安全性,再执行
论文推荐
Dyna 架构
Integrated Architectures for Learning, Planning, and Reacting
Based on Approximating Dynamic Programming (Sutton, 1990)经典教材:Reinforcement Learning: An Introduction Chapter
8
MBPO
When to Trust Your Model: Model-Based Policy Optimization
(Janner et al., NeurIPS 2019)链接:arXiv:1906.08253
World Models
PlaNet
Learning Latent Dynamics for Planning from Pixels (Hafner
et al., ICML 2019)链接:arXiv:1811.04551
Dreamer
Dream to Control: Learning Behaviors by Latent Imagination
(Hafner et al., ICLR 2020)链接:arXiv:1912.01603
DreamerV2
Mastering Atari with Discrete World Models (Hafner et al.,
ICLR 2021)链接:arXiv:2010.02193
DreamerV3
Mastering Diverse Domains through World Models (Hafner et
al., 2023)链接:arXiv:2301.04104
MuZero
Mastering Atari, Go, Chess and Shogi by Planning with a Learned
Model (Schrittwieser et al., Nature 2020)链接:arXiv:1911.08265
STEVE-1(Minecraft with World Models)
See, Think, Explore, Search, and Interact: Open-World AGI in
Minecraft (2023)链接:arXiv:2311.08845
Model-Based RL 综述
Model-Based Reinforcement Learning: A Survey (Moerland et
al., 2023)链接:arXiv:2006.16712
核心公式总结
Dyna-Q 更新
MBPO 展开
Dreamer 表示学习
Dreamer 行为学习
MuZero 预测
总结与展望
Model-Based
强化学习通过学习环境模型,实现了"先想后做"的智能决策,大幅提升了样本效率。从经典的
Dyna 架构到深度学习时代的 MBPO 、 World Models 、 Dreamer 和
MuZero,每一步改进都源于对模型误差、表示学习和规划效率的深刻理解。
Model-Based
方法在样本受限的实际应用(如机器人、自动驾驶)中展现出巨大潜力,但模型误差累积、计算开销和泛化能力仍是挑战。
未来的研究可能融合符号推理、因果建模和神经网络,构建更可解释、可组合、可迁移的世界模型。正如人类通过内部模型理解物理规律、社会规则和他人意图,下一代
AI
系统可能也需要类似的"世界理解"能力——这不仅是强化学习的核心问题,也是通向通用人工智能的关键路径之一。
从 Model-Based 的规划视角出发,下一章我们将进入 AlphaGo
与蒙特卡洛树搜索——通过结合深度学习与经典搜索算法,揭示如何在完美信息博弈中实现超人类水平,并探讨搜索与学习的深层联系。