如果说价值函数方法是通过"评估动作好坏"来间接学习策略,那么策略梯度方法则是直接优化策略本身。
DQN
的成功证明了深度学习在强化学习中的巨大潜力,但其局限也很明显——只能处理离散动作空间,在机器人控制、自动驾驶等连续控制任务中无能为力。
Policy Gradient 方法通过将策略参数化为神经网络
Policy Gradient
基础:直接优化策略
为什么需要 Policy Gradient
在第二章中,我们看到 DQN 通过学习 Q 函数
问题 1:只能处理离散动作
DQN 需要计算
问题 2:确定性策略的探索困境
贪心策略
问题 3:值函数近似误差的累积
在高维状态空间,Q 函数的逼近误差会通过
问题 4:无法表示随机策略
某些问题的最优策略本身就是随机的。经典例子是石头剪刀布游戏——确定性策略必然被对手利用,最优策略是等概率随机。
Policy Gradient 方法通过直接参数化策略
策略梯度定理
设策略
其中
直觉上,我们想对
策略梯度定理 (Policy Gradient Theorem, Sutton et al.,
2000)给出了精确的梯度表达式:
这个公式非常优美: -
更妙的是,梯度不依赖于状态转移概率
推导:从轨迹分布到策略梯度
完整推导需要一些技巧。首先,将目标写成轨迹分布:
其中
对
使用 log-derivative 技巧:
展开
对
代入得:
这是 REINFORCE 算法的形式。进一步,注意到
其中
Baseline:减小方差
策略梯度的一个问题是方差很大。考虑
一个简单但有效的技巧是减去一个 baseline
只要
最常用的 baseline 是状态价值函数
称为优势函数(advantage function)。直觉上,
REINFORCE
算法:蒙特卡洛策略梯度
算法流程
REINFORCE(Williams, 1992)是最简单的策略梯度算法:
算法:REINFORCE
随机初始化策略参数
for episodedo 3.计 算 回 报 累 积 梯 度 J = _(a_t|s_t)
G_t
end for
关键点: - 第 3 行:采样完整轨迹(on-policy,必须用当前策略) - 第 5
行:从
带 Baseline 的 REINFORCE
加入状态价值函数
算法:REINFORCE with Baseline
初始化策略参数
for episodedo 3.优 势 估 计 策 略 梯 度 J = (a_t|s_t) A_t价 值 函 数 损 失 V = (G_t -
V (s_t))^2更 新 _J
end for
第 8 行用均方误差训练价值函数,使其逼近真实回报
代码实现:CartPole
下面用 PyTorch 实现 REINFORCE 解决 CartPole 环境:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 import torchimport torch.nn as nnimport torch.optim as optimimport torch.nn.functional as Ffrom torch.distributions import Categoricalimport gymimport numpy as npclass PolicyNetwork (nn.Module): """策略网络:输出动作概率分布""" def __init__ (self, state_dim, action_dim, hidden_dim=128 ): super (PolicyNetwork, self).__init__() self.fc1 = nn.Linear(state_dim, hidden_dim) self.fc2 = nn.Linear(hidden_dim, hidden_dim) self.fc3 = nn.Linear(hidden_dim, action_dim) def forward (self, state ): x = F.relu(self.fc1(state)) x = F.relu(self.fc2(x)) action_logits = self.fc3(x) return F.softmax(action_logits, dim=-1 ) class ValueNetwork (nn.Module): """价值网络:输出状态价值""" def __init__ (self, state_dim, hidden_dim=128 ): super (ValueNetwork, self).__init__() self.fc1 = nn.Linear(state_dim, hidden_dim) self.fc2 = nn.Linear(hidden_dim, hidden_dim) self.fc3 = nn.Linear(hidden_dim, 1 ) def forward (self, state ): x = F.relu(self.fc1(state)) x = F.relu(self.fc2(x)) return self.fc3(x) def compute_returns (rewards, gamma=0.99 ): """计算折扣回报""" returns = [] R = 0 for r in reversed (rewards): R = r + gamma * R returns.insert(0 , R) return returns def reinforce_with_baseline (env_name='CartPole-v1' , episodes=1000 , gamma=0.99 ): env = gym.make(env_name) state_dim = env.observation_space.shape[0 ] action_dim = env.action_space.n policy_net = PolicyNetwork(state_dim, action_dim) value_net = ValueNetwork(state_dim) policy_optimizer = optim.Adam(policy_net.parameters(), lr=3e-4 ) value_optimizer = optim.Adam(value_net.parameters(), lr=1e-3 ) episode_rewards = [] for episode in range (episodes): state = env.reset() log_probs = [] values = [] rewards = [] while True : state_tensor = torch.FloatTensor(state).unsqueeze(0 ) action_probs = policy_net(state_tensor) dist = Categorical(action_probs) action = dist.sample() value = value_net(state_tensor) next_state, reward, done, _ = env.step(action.item()) log_probs.append(dist.log_prob(action)) values.append(value) rewards.append(reward) state = next_state if done: break returns = compute_returns(rewards, gamma) returns = torch.FloatTensor(returns) log_probs = torch.stack(log_probs) values = torch.cat(values) advantages = returns - values.detach() policy_loss = -(log_probs * advantages).mean() value_loss = F.mse_loss(values, returns) policy_optimizer.zero_grad() policy_loss.backward() policy_optimizer.step() value_optimizer.zero_grad() value_loss.backward() value_optimizer.step() episode_rewards.append(sum (rewards)) if (episode + 1 ) % 100 == 0 : avg_reward = np.mean(episode_rewards[-100 :]) print (f"Episode {episode+1 } , Avg Reward: {avg_reward:.2 f} " ) return policy_net, value_net, episode_rewards policy_net, value_net, rewards = reinforce_with_baseline(episodes=1000 ) import matplotlib.pyplot as pltplt.figure(figsize=(10 , 5 )) plt.plot(rewards, alpha=0.3 ) plt.plot(np.convolve(rewards, np.ones(50 )/50 , mode='valid' ), linewidth=2 ) plt.xlabel('Episode' ) plt.ylabel('Total Reward' ) plt.title('REINFORCE with Baseline on CartPole' ) plt.grid(True ) plt.show()
这段代码通常在 100-200 个 episode 内就能解决
CartPole(平均奖励>195)。
REINFORCE 的优缺点
优点: - 简单直观,易于实现 -
无偏梯度估计(因为用真实回报
缺点: - 高方差:
这些缺点促使研究者探索更先进的方法。
Actor-Critic
架构:结合策略与价值
从 REINFORCE 到 Actor-Critic
REINFORCE 用完整回报
回顾策略梯度:
在 REINFORCE 中,
架构分为两部分: - Actor(演员) :策略网络Critic(评论家) :价值网络
Actor 根据 Critic 的反馈更新,Critic
根据环境的奖励更新。这种"演员-评论家"的互动是 Actor-Critic
名字的由来。
优势 Actor-Critic(A2C)
使用状态价值函数
这是 1-step TD 误差。相比
完整算法:
算法:Advantage Actor-Critic (A2C)
初始化 Actor 参数
for stepdo 3.(|s_t) {t+1}计 算 误 差 t = r_t +
V (s_{t+1}) - V_(s_t)更 新
end for
注意: - 第 6 行用 TD 误差作为优势估计 - 第 7 行最小化价值函数的 TD
误差 - 第 8 行用 TD 误差指导策略更新
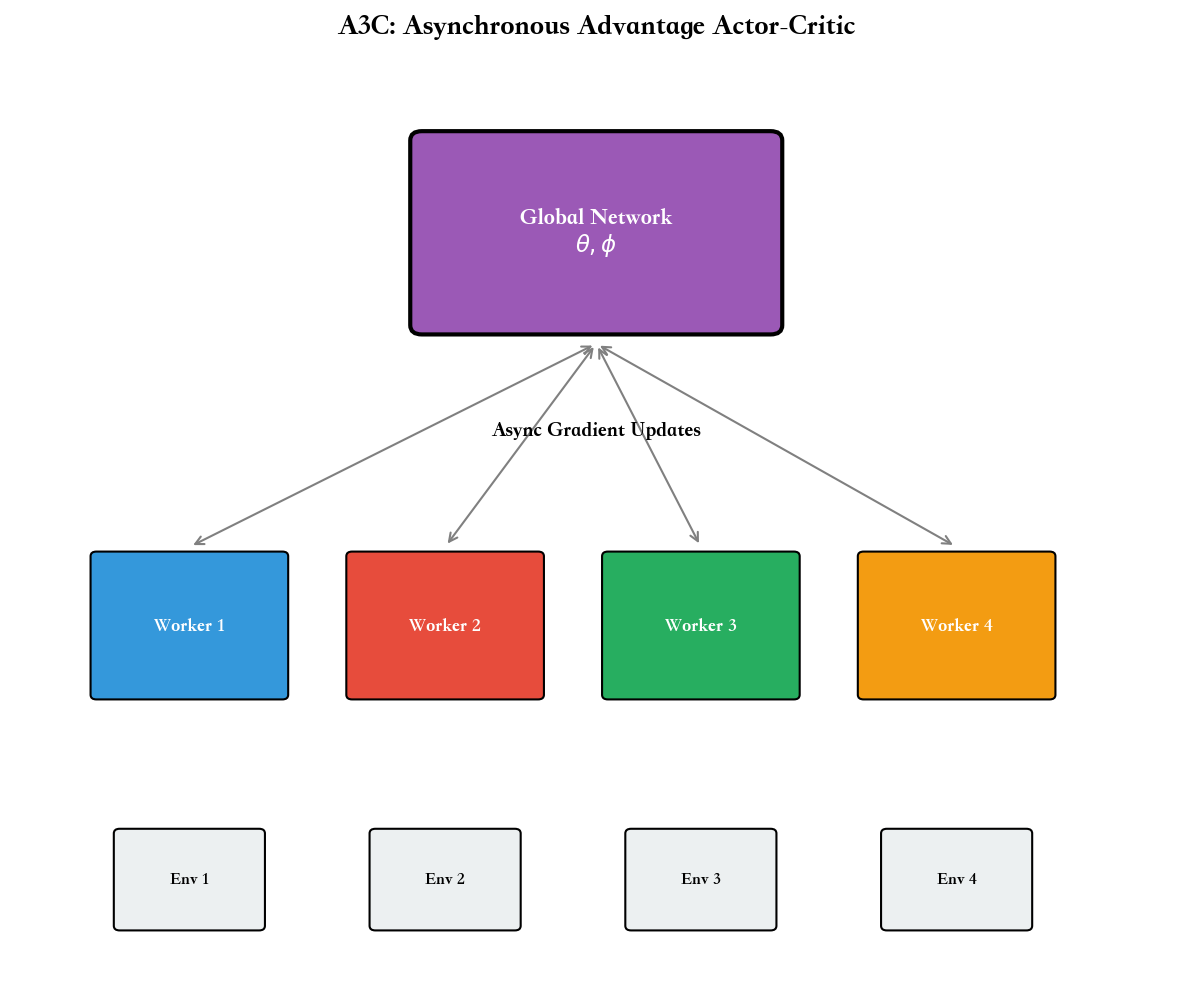
A3C:异步优势 Actor-Critic
A3C(Asynchronous Advantage Actor-Critic, Mnih et al., 2016)是 A2C
的并行版本,也是第一个在 Atari 上与 DQN 竞争的 on-policy 算法。
核心思想: 并行运行多个环境实例,每个 worker
独立采样并计算梯度,异步更新共享的全局参数。
为什么并行有效? - 打破样本相关性:不同 worker
的经验来自不同状态,相关性降低 - 加速训练:多核 CPU 可以同时采样,GPU
用于更新网络 - 探索多样性:不同 worker
可以使用不同的探索策略(如不同的
伪代码(简化版):
算法:A3C(单个 Worker)
全局参数
Worker同 步 采 样 步 经 验 {t=1}^n计 算 {k=0}^{n-1} ^k r_{t+k} + ^n V_{'}(s_{t+n})计 算 优 势 累 积 策 略 梯 度 J = t {'}
{'}(a_t|s_t) A_t累 积 价 值 梯 度 V = t {'} (R_t - V {'}(s_t))^2异 步 更 新 全 局 参 数 end loop
A3C 在 2016 年取得了巨大成功,在 Atari 上达到接近 DQN
的性能,且训练速度更快(利用了多核
CPU)。但它也有缺点:异步更新可能导致梯度过时(一个 worker
计算梯度时,全局参数已被其他 worker 修改),影响稳定性。
现代实现通常使用同步版本
A2C(去掉"Asynchronous"),在多个环境中并行采样,统一更新参数,避免异步带来的问题。
代码实现:A2C 多环境
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 import torchimport torch.nn as nnimport torch.optim as optimimport torch.nn.functional as Ffrom torch.distributions import Categoricalimport gymimport numpy as npclass ActorCritic (nn.Module): """共享参数的 Actor-Critic 网络""" def __init__ (self, state_dim, action_dim, hidden_dim=128 ): super (ActorCritic, self).__init__() self.fc1 = nn.Linear(state_dim, hidden_dim) self.fc2 = nn.Linear(hidden_dim, hidden_dim) self.actor = nn.Linear(hidden_dim, action_dim) self.critic = nn.Linear(hidden_dim, 1 ) def forward (self, state ): x = F.relu(self.fc1(state)) x = F.relu(self.fc2(x)) action_probs = F.softmax(self.actor(x), dim=-1 ) state_value = self.critic(x) return action_probs, state_value def a2c_multi_env (env_name='CartPole-v1' , n_envs=8 , n_steps=5 , episodes=500 , gamma=0.99 ): envs = [gym.make(env_name) for _ in range (n_envs)] state_dim = envs[0 ].observation_space.shape[0 ] action_dim = envs[0 ].action_space.n model = ActorCritic(state_dim, action_dim) optimizer = optim.Adam(model.parameters(), lr=3e-4 ) states = [env.reset() for env in envs] episode_rewards = [0 ] * n_envs all_rewards = [] for step in range (episodes * 200 // n_envs): log_probs_list = [] values_list = [] rewards_list = [] dones_list = [] for _ in range (n_steps): states_tensor = torch.FloatTensor(states) action_probs, values = model(states_tensor) dist = Categorical(action_probs) actions = dist.sample() log_probs_list.append(dist.log_prob(actions)) values_list.append(values.squeeze()) next_states = [] rewards = [] dones = [] for i, (env, action) in enumerate (zip (envs, actions)): next_state, reward, done, _ = env.step(action.item()) episode_rewards[i] += reward rewards.append(reward) dones.append(done) if done: all_rewards.append(episode_rewards[i]) episode_rewards[i] = 0 next_state = env.reset() next_states.append(next_state) rewards_list.append(torch.FloatTensor(rewards)) dones_list.append(torch.FloatTensor(dones)) states = next_states with torch.no_grad(): next_states_tensor = torch.FloatTensor(states) _, next_values = model(next_states_tensor) next_values = next_values.squeeze() returns = next_values advantage_list = [] for t in reversed (range (n_steps)): returns = rewards_list[t] + gamma * returns * (1 - dones_list[t]) advantage = returns - values_list[t] advantage_list.insert(0 , advantage) log_probs = torch.stack(log_probs_list) values = torch.stack(values_list) advantages = torch.stack(advantage_list) returns_all = values + advantages actor_loss = -(log_probs * advantages.detach()).mean() critic_loss = F.mse_loss(values, returns_all.detach()) entropy = -(action_probs * torch.log(action_probs + 1e-8 )).sum (dim=-1 ).mean() loss = actor_loss + 0.5 * critic_loss - 0.01 * entropy optimizer.zero_grad() loss.backward() torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=0.5 ) optimizer.step() if (step + 1 ) % 100 == 0 and len (all_rewards) > 0 : print (f"Step {step+1 } , Avg Reward: {np.mean(all_rewards[-100 :]):.2 f} " ) return model, all_rewards model, rewards = a2c_multi_env(n_envs=8 , episodes=500 )
这个实现使用 8 个并行环境,每次采样 5 步(n-step
return),大幅提升样本效率和训练速度。
连续控制:DDPG 与 TD3
从离散到连续:挑战
前面的算法(REINFORCE, A2C)都针对离散动作空间。对于连续动作
网络输出均值
但这种随机策略有个问题:在某些任务中(如精确控制),最优策略可能是确定性的。每次都采样引入不必要的噪声,降低性能。
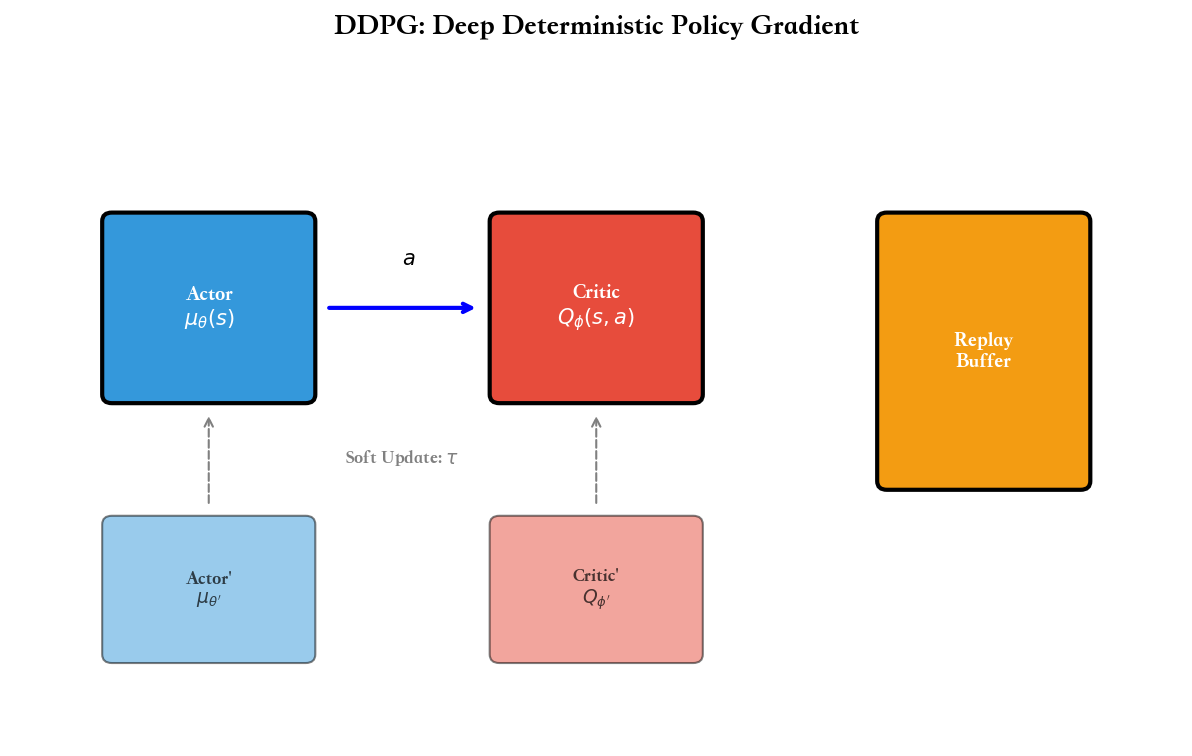
DDPG(Deep Deterministic Policy
Gradient)的思路是:学习一个确定性策略
DDPG:确定性策略梯度
DDPG(Lillicrap et al., 2016)结合了 DQN 和 Actor-Critic 的思想: - 像
DQN 一样使用经验回放和目标网络 - 像 Actor-Critic
一样分离策略(Actor)和价值(Critic)
确定性策略梯度定理 (Silver et al.,
2014)指出,对于确定性策略
直觉:价值函数
DDPG 算法:
算法:DDPG
初始化 Actor初 始 化 目 标 网 络 {'} {'}初 始 化 经 验 回 放
for episodedo 5.重 置 环 境 得 到 初 始 状 态 选 择 动 作 (s_t)
+ t加 噪 声 探 索 {t+1}i)计 算 目 标 {'}(s'i, {'}(s'i))更 新 最 小 化 i (y_i -
Q (s_i, a_i))^2更 新 J i (s_i) a Q (s_i,
a)|{a= (s_i)}
16.end for
17. end for
关键点: - 第 8 行:确定性策略+探索噪声(通常是 Ornstein-Uhlenbeck 过程)
- 第 12 行:目标网络计算 TD 目标,注意动作也是目标网络给出
TD3:双延迟 DDPG
DDPG 有个严重问题:Q 值过估计。原因类似 DQN ——目标
TD3(Twin Delayed DDPG, Fujimoto et al.,
2018)引入三个技巧缓解这个问题:
技巧 1:Clipped Double Q-Learning
学习两个 Critic
直觉:两个独立估计都过估计的概率较小,取最小值偏保守,抑制过估计。
技巧 2:Delayed Policy Updates
Actor 的更新频率低于 Critic ——每更新 2 次 Critic 才更新 1 次 Actor
。原因是:Critic 需要先收敛到较准确的 Q 值,Actor 才能根据准确的 Q
值优化。如果两者同步更新,Actor 可能利用 Critic
的误差,学到错误的策略。
技巧 3:Target Policy Smoothing
在计算目标时,对目标动作加噪声:
直觉:平滑后的目标不会因为单个动作的 Q
值异常而剧烈波动,类似正则化。
完整算法太长,这里给出核心代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 class TD3 : def __init__ (self, state_dim, action_dim, max_action ): self.actor = Actor(state_dim, action_dim, max_action) self.actor_target = Actor(state_dim, action_dim, max_action) self.actor_target.load_state_dict(self.actor.state_dict()) self.actor_optimizer = optim.Adam(self.actor.parameters(), lr=3e-4 ) self.critic_1 = Critic(state_dim, action_dim) self.critic_2 = Critic(state_dim, action_dim) self.critic_1_target = Critic(state_dim, action_dim) self.critic_2_target = Critic(state_dim, action_dim) self.critic_1_target.load_state_dict(self.critic_1.state_dict()) self.critic_2_target.load_state_dict(self.critic_2.state_dict()) self.critic_optimizer = optim.Adam( list (self.critic_1.parameters()) + list (self.critic_2.parameters()), lr=3e-4 ) self.max_action = max_action self.total_it = 0 def select_action (self, state ): state = torch.FloatTensor(state).unsqueeze(0 ) return self.actor(state).cpu().data.numpy().flatten() def train (self, replay_buffer, batch_size=256 ): self.total_it += 1 state, action, reward, next_state, done = replay_buffer.sample(batch_size) with torch.no_grad(): noise = (torch.randn_like(action) * 0.2 ).clamp(-0.5 , 0.5 ) next_action = (self.actor_target(next_state) + noise).clamp(-self.max_action, self.max_action) target_Q1 = self.critic_1_target(next_state, next_action) target_Q2 = self.critic_2_target(next_state, next_action) target_Q = torch.min (target_Q1, target_Q2) target_Q = reward + (1 - done) * 0.99 * target_Q current_Q1 = self.critic_1(state, action) current_Q2 = self.critic_2(state, action) critic_loss = F.mse_loss(current_Q1, target_Q) + F.mse_loss(current_Q2, target_Q) self.critic_optimizer.zero_grad() critic_loss.backward() self.critic_optimizer.step() if self.total_it % 2 == 0 : actor_loss = -self.critic_1(state, self.actor(state)).mean() self.actor_optimizer.zero_grad() actor_loss.backward() self.actor_optimizer.step() for param, target_param in zip (self.actor.parameters(), self.actor_target.parameters()): target_param.data.copy_(0.005 * param.data + 0.995 * target_param.data) for param, target_param in zip (self.critic_1.parameters(), self.critic_1_target.parameters()): target_param.data.copy_(0.005 * param.data + 0.995 * target_param.data) for param, target_param in zip (self.critic_2.parameters(), self.critic_2_target.parameters()): target_param.data.copy_(0.005 * param.data + 0.995 * target_param.data)
TD3 在 MuJoCo 连续控制任务上超越了 DDPG,成为 off-policy
连续控制的基准算法。
信任域方法:TRPO 与 PPO
策略更新的困境
策略梯度方法有个根本问题:学习率难调。太小,训练慢;太大,新策略可能比旧策略差很多(毕竟梯度只是局部信息),导致性能崩溃。
一个改进思路是:限制每次更新的步长,确保新策略与旧策略"不太远"。但怎么衡量"距离"?欧氏距离
信任域方法(Trust Region Methods)用 KL 散度衡量策略之间的距离:
并限制
TRPO:严格的信任域优化
TRPO(Trust Region Policy Optimization, Schulman et al.,
2015)将策略优化写成约束优化问题:
目标函数中的
TRPO
用共轭梯度法求解这个约束优化问题,理论上保证单调改进(新策略不会比旧策略差)。但实现复杂,计算昂贵。
PPO:简化的信任域
PPO(Proximal Policy Optimization, Schulman et al., 2017)简化
TRPO,用裁剪(clipping)替代 KL 约束:
其中: -
直觉: - 如果
PPO 的优势: - 实现简单,只需在损失函数中加裁剪 - 不需要计算 KL 散度或
Hessian 矩阵 - 性能接近 TRPO,但速度更快
PPO 已成为工业界最常用的策略梯度算法,OpenAI 、 DeepMind
等都广泛使用。
完整 PPO 实现
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 import torchimport torch.nn as nnimport torch.optim as optimimport torch.nn.functional as Ffrom torch.distributions import Categoricalimport gymimport numpy as npclass PPOActorCritic (nn.Module): def __init__ (self, state_dim, action_dim, hidden_dim=64 ): super (PPOActorCritic, self).__init__() self.fc1 = nn.Linear(state_dim, hidden_dim) self.fc2 = nn.Linear(hidden_dim, hidden_dim) self.actor = nn.Linear(hidden_dim, action_dim) self.critic = nn.Linear(hidden_dim, 1 ) def forward (self, state ): x = F.tanh(self.fc1(state)) x = F.tanh(self.fc2(x)) action_probs = F.softmax(self.actor(x), dim=-1 ) state_value = self.critic(x) return action_probs, state_value class PPO : def __init__ (self, state_dim, action_dim, lr=3e-4 , gamma=0.99 , eps_clip=0.2 , K_epochs=10 ): self.gamma = gamma self.eps_clip = eps_clip self.K_epochs = K_epochs self.policy = PPOActorCritic(state_dim, action_dim) self.optimizer = optim.Adam(self.policy.parameters(), lr=lr) self.policy_old = PPOActorCritic(state_dim, action_dim) self.policy_old.load_state_dict(self.policy.state_dict()) self.MseLoss = nn.MSELoss() def select_action (self, state ): with torch.no_grad(): state = torch.FloatTensor(state).unsqueeze(0 ) action_probs, _ = self.policy_old(state) dist = Categorical(action_probs) action = dist.sample() action_logprob = dist.log_prob(action) return action.item(), action_logprob.item() def update (self, memory ): rewards = [] discounted_reward = 0 for reward, is_terminal in zip (reversed (memory.rewards), reversed (memory.is_terminals)): if is_terminal: discounted_reward = 0 discounted_reward = reward + (self.gamma * discounted_reward) rewards.insert(0 , discounted_reward) rewards = torch.tensor(rewards, dtype=torch.float32) rewards = (rewards - rewards.mean()) / (rewards.std() + 1e-7 ) old_states = torch.FloatTensor(memory.states) old_actions = torch.LongTensor(memory.actions) old_logprobs = torch.FloatTensor(memory.logprobs) for _ in range (self.K_epochs): action_probs, state_values = self.policy(old_states) dist = Categorical(action_probs) action_logprobs = dist.log_prob(old_actions) dist_entropy = dist.entropy() state_values = state_values.squeeze() ratios = torch.exp(action_logprobs - old_logprobs.detach()) advantages = rewards - state_values.detach() surr1 = ratios * advantages surr2 = torch.clamp(ratios, 1 -self.eps_clip, 1 +self.eps_clip) * advantages loss = -torch.min (surr1, surr2) + 0.5 *self.MseLoss(state_values, rewards) - 0.01 *dist_entropy self.optimizer.zero_grad() loss.mean().backward() self.optimizer.step() self.policy_old.load_state_dict(self.policy.state_dict()) class Memory : def __init__ (self ): self.actions = [] self.states = [] self.logprobs = [] self.rewards = [] self.is_terminals = [] def clear_memory (self ): del self.actions[:] del self.states[:] del self.logprobs[:] del self.rewards[:] del self.is_terminals[:] def train_ppo (env_name='CartPole-v1' , max_episodes=1000 , update_timestep=200 ): env = gym.make(env_name) state_dim = env.observation_space.shape[0 ] action_dim = env.action_space.n ppo = PPO(state_dim, action_dim) memory = Memory() timestep = 0 episode_rewards = [] for episode in range (max_episodes): state = env.reset() episode_reward = 0 for t in range (500 ): timestep += 1 action, action_logprob = ppo.select_action(state) next_state, reward, done, _ = env.step(action) memory.states.append(state) memory.actions.append(action) memory.logprobs.append(action_logprob) memory.rewards.append(reward) memory.is_terminals.append(done) state = next_state episode_reward += reward if timestep % update_timestep == 0 : ppo.update(memory) memory.clear_memory() if done: break episode_rewards.append(episode_reward) if (episode + 1 ) % 50 == 0 : avg_reward = np.mean(episode_rewards[-50 :]) print (f"Episode {episode+1 } , Avg Reward: {avg_reward:.2 f} " ) return ppo, episode_rewards ppo, rewards = train_ppo(max_episodes=1000 )
PPO 通常在 100-200 个 episode 内解决 CartPole,且训练曲线非常平滑(相比
REINFORCE)。
最大熵强化学习:SAC
熵正则化的动机
传统 RL
的目标是最大化期望回报。但这有个问题:策略可能过早收敛到局部最优,缺乏探索。
一个改进思路是鼓励策略的"多样性"——不要总是选择同一个动作,而是保持一定的随机性。衡量随机性的指标是熵(entropy):
熵越大,策略越随机;熵为 0,策略完全确定。
最大熵强化学习 的目标是:
其中
好处: - 自动探索:不需要人工设计探索策略(如
SAC:Soft Actor-Critic
SAC(Soft Actor-Critic, Haarnoja et al., 2018)是最大熵框架下的
off-policy 算法,结合了: - Actor-Critic 架构 - 经验回放和目标网络(like
DDPG) - 熵正则化
核心思想:
Soft Q-function : Q 值包含熵奖励
策略更新 : 最大化 Q 值+熵
自动调节温度 :
伪代码(简化):
算法:SAC
初始化 Actor
初始化目标 Critic
for stepdo 4.
7.end
for
SAC
在连续控制任务上表现出色,兼具样本效率(off-policy)和稳定性(最大熵),被广泛应用于机器人控制。
代码框架
完整的 SAC 实现较长(约 500 行),这里展示核心部分:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 class SAC : def __init__ (self, state_dim, action_dim, max_action ): self.actor = GaussianPolicy(state_dim, action_dim, max_action) self.critic_1 = QNetwork(state_dim, action_dim) self.critic_2 = QNetwork(state_dim, action_dim) self.critic_1_target = QNetwork(state_dim, action_dim) self.critic_2_target = QNetwork(state_dim, action_dim) self.target_entropy = -action_dim self.log_alpha = torch.zeros(1 , requires_grad=True ) self.alpha = self.log_alpha.exp() self.actor_optimizer = optim.Adam(self.actor.parameters(), lr=3e-4 ) self.critic_optimizer = optim.Adam( list (self.critic_1.parameters()) + list (self.critic_2.parameters()), lr=3e-4 ) self.alpha_optimizer = optim.Adam([self.log_alpha], lr=3e-4 ) def select_action (self, state, evaluate=False ): state = torch.FloatTensor(state).unsqueeze(0 ) if evaluate: _, _, action = self.actor.sample(state) else : action, _, _ = self.actor.sample(state) return action.detach().cpu().numpy()[0 ] def train (self, replay_buffer, batch_size=256 ): state, action, reward, next_state, done = replay_buffer.sample(batch_size) with torch.no_grad(): next_action, next_log_prob, _ = self.actor.sample(next_state) target_Q1 = self.critic_1_target(next_state, next_action) target_Q2 = self.critic_2_target(next_state, next_action) target_Q = torch.min (target_Q1, target_Q2) - self.alpha * next_log_prob target_Q = reward + (1 - done) * 0.99 * target_Q current_Q1 = self.critic_1(state, action) current_Q2 = self.critic_2(state, action) critic_loss = F.mse_loss(current_Q1, target_Q) + F.mse_loss(current_Q2, target_Q) self.critic_optimizer.zero_grad() critic_loss.backward() self.critic_optimizer.step() new_action, log_prob, _ = self.actor.sample(state) Q1_new = self.critic_1(state, new_action) Q2_new = self.critic_2(state, new_action) Q_new = torch.min (Q1_new, Q2_new) actor_loss = (self.alpha * log_prob - Q_new).mean() self.actor_optimizer.zero_grad() actor_loss.backward() self.actor_optimizer.step() alpha_loss = -(self.log_alpha * (log_prob + self.target_entropy).detach()).mean() self.alpha_optimizer.zero_grad() alpha_loss.backward() self.alpha_optimizer.step() self.alpha = self.log_alpha.exp() for param, target_param in zip (self.critic_1.parameters(), self.critic_1_target.parameters()): target_param.data.copy_(0.005 * param.data + 0.995 * target_param.data) for param, target_param in zip (self.critic_2.parameters(), self.critic_2_target.parameters()): target_param.data.copy_(0.005 * param.data + 0.995 * target_param.data)
SAC 在 MuJoCo 任务上通常优于 TD3 和
PPO,是目前连续控制的顶尖算法之一。
算法对比与选择指南
主要算法对比
算法
类型
动作空间
样本效率
稳定性
实现难度
适用场景
REINFORCE
On-policy
离散/连续
低
中
易
简单任务,教学用
A2C/A3C
On-policy
离散/连续
中
中
中
Atari,并行环境
PPO
On-policy
离散/连续
中
高
中
通用,工业界首选
TRPO
On-policy
离散/连续
中
高
难
理论研究
DDPG
Off-policy
连续
高
低
中
连续控制,已被 TD3 取代
TD3
Off-policy
连续
高
中
中
连续控制,样本效率重要
SAC
Off-policy
连续
高
高
难
连续控制,追求性能
选择建议
1. 根据动作空间: - 离散动作:PPO(首选)、 A2C 、 DQN -
连续动作:SAC(首选)、 TD3 、 PPO
2. 根据样本预算: - 样本昂贵(如真实机器人):SAC 、
TD3(off-policy,高样本效率) - 样本充足(如模拟器):PPO(更稳定)
3. 根据实现资源: - 快速原型:PPO(OpenAI Baselines 、
Stable Baselines 都有现成实现) - 从零实现:REINFORCE 或 A2C(代码简单)
4. 根据任务特点: - 稀疏奖励:SAC(熵鼓励探索) -
稠密奖励:PPO 或 TD3 - 部分可观测:LSTM+A2C 或 PPO - 多智能体:MADDPG(TD3
的多智能体版本)
5. 工业应用: - OpenAI 、 DeepMind:PPO
用于大规模训练(如 Dota 2 、 StarCraft II) - 机器人控制:SAC(Berkeley RL
lab 推荐) - 自动驾驶:SAC 或 TD3
深度 Q&A
Q1:为什么
Policy Gradient 能处理连续动作而 DQN 不能?
A :根本区别在于策略的表示方式。 DQN 学习 Q 函数
这是一个连续优化问题,没有解析解,需要迭代算法(如梯度上升)求解。每次选择动作都要运行优化器,计算昂贵且不精确。
Policy Gradient 方法直接参数化策略
Q2:为什么 REINFORCE
方差大?如何降低?
A :REINFORCE 用完整回报
轨迹随机性:不同轨迹的
长期累积:误差沿时间累积,
降低方差的方法:
方法 1:Baseline 减去状态价值
方法 2:Critic(Actor-Critic) 用函数逼近
方法 3:多步 return 用 n-step return
方法 4:GAE(Generalized Advantage Estimation)
指数加权多步 TD 误差:
Q3:PPO 的裁剪机制如何工作?
A :PPO 的目标是:
其中
情况 1: - 如果
直觉:好动作的概率不能增长过快,最多到旧策略的
情况 2: - 如果
直觉:坏动作的概率不能减小过快,最少到旧策略的
这个机制确保新策略与旧策略的 KL
散度不会太大,避免"一步跨太大"导致性能崩溃。
Q4:DDPG 与 TD3 的核心区别?
A :TD3 在 DDPG 基础上加三个技巧解决 Q 值过估计:
1. Clipped Double Q-Learning - DDPG:单个 Critic
2. Delayed Policy Updates - DDPG:Actor 和 Critic
同步更新,每步都更新 - TD3:Critic 更新 2 次,Actor 才更新 1 次
原因:Critic 需要先收敛到准确的 Q 值,Actor
才能根据准确的梯度优化。如果同步更新,Actor 可能利用 Critic
的误差学到错误策略。
3. Target Policy Smoothing - DDPG:目标动作
实验表明,三个技巧都重要,组合后 TD3 在 MuJoCo 上全面超越 DDPG,成为新的
off-policy 连续控制基准。
Q5:SAC
的自动温度调节如何工作?
A :SAC 的目标是:
温度
早期 SAC 手动设置
目标熵约束 :设定目标熵
即策略的平均熵不低于目标。
对偶优化 :引入拉格朗日乘子
对
实现中,
注意
这样
Q6:为什么 PPO 比 TRPO 更流行?
A :TRPO 理论上更严格(单调改进保证),但实践中 PPO
更受欢迎,原因:
1. 实现简单 - TRPO:需要计算 Hessian
矩阵的逆或用共轭梯度法,涉及二阶优化,代码复杂(约 1000 行) -
PPO:只需修改损失函数加入 clip,一阶优化(Adam),代码简单(约 200 行)
2. 计算效率 - TRPO:共轭梯度法每次迭代需要多次
Hessian-向量乘法,计算昂贵 - PPO:标准梯度下降,速度快 2-3 倍
3. 性能相当 实验表明,PPO 在多数任务上性能接近或超过
TRPO 。 PPO 的 clip 机制虽然是启发式的,但实践中很有效。
4. 超参数鲁棒 - TRPO:对 KL 约束
5. 易于扩展 PPO 的 clip 机制很容易与其他技术结合(如
GAE 、奖励塑形、课程学习),而 TRPO 的约束优化框架不太灵活。
OpenAI 在训练 Dota 2 AI 和 ChatGPT 的 RLHF 阶段都使用
PPO,验证了其大规模应用的可行性。
Q7:on-policy vs
off-policy,各有什么优缺点?
A :
On-policy(REINFORCE, A2C, PPO, TRPO):
优点: - 稳定性好:训练数据与当前策略匹配,分布一致,梯度估计更准确 -
理论简单:直接优化期望回报,无需重要性采样修正 -
容易实现:不需要经验回放等复杂机制
缺点: - 样本效率低:每条经验只用一次(当前策略生成的),用完就扔 -
难以并行:虽然可以多环境采样(如 A3C),但数据必须来自当前策略 -
探索不足:依赖策略自身的随机性,可能过早收敛
Off-policy(DQN, DDPG, TD3, SAC):
优点: - 样本效率高:经验回放允许多次重用数据,每条经验可用几十次 -
灵活探索:可以用任意探索策略(如
缺点: -
训练不稳定:数据分布与目标策略不匹配,需要重要性采样修正或目标网络稳定 -
理论复杂:涉及 off-policy 修正、分布偏移等问题 -
可能发散:函数逼近+off-policy+bootstrapping(deadly triad)容易不收敛
选择建议 : - 样本昂贵(如真实机器人):off-policy(SAC 、
TD3) - 样本充足(如模拟器、 Atari):on-policy(PPO) -
需要稳定训练:on-policy - 需要从演示学习:off-policy
Q8:Actor-Critic
中 Actor 和 Critic 如何互相促进?
A :Actor-Critic 是一个迭代改进的过程:
Critic → Actor(评论家指导演员):
Critic 学习价值函数
这样,Actor 不是盲目试错,而是有方向地改进(朝 Q 值增大的方向)。
Actor → Critic(演员帮助评论家):
Critic 需要数据来学习价值函数。 Actor 生成新的轨迹
更重要的是,Actor 的改进使策略更优,Critic
能访问到更高价值的状态,学习到更准确的价值函数(正样本增多)。
正反馈循环:
好的 Critic → Actor 改进更快 → 访问更好的状态 → Critic 学得更准 →
Actor 进一步改进
这个循环最终收敛到最优策略和最优价值函数(理论上,实践中可能收敛到局部最优)。
关键是平衡两者的学习速率: - 如果 Actor 学太快,Critic
跟不上,提供错误的价值估计,Actor 学偏 - 如果 Critic 学太快,Actor
更新太慢,浪费准确的价值信息
通常设置 Actor 学习率 < Critic 学习率(如
Q9:如何选择折扣因子
A :折扣因子
理论考虑:
任务时长 :
短期任务(如 CartPole,几十步结束):
有效时域 :折扣因子决定"有效规划长度"
如果任务需要 100 步规划,但
方差与偏差 : -
实践建议:
先用
如果训练不稳定(方差大),适当减小(如 0.95)
如果任务明显需要长期规划但智能体学不到,增大
某些任务可以用变化的
示例: - CartPole:
Q10:如何调试策略梯度算法?
A :策略梯度算法调试比监督学习难,因为奖励信号稀疏且延迟。系统化调试流程:
1. 检查环境和数据 -
随机策略的平均回报:如果比智能体还好,说明智能体有问题 -
手动策略的回报:人类专家能达到多少?上界在哪里? -
奖励分布:检查是否有异常值(如突然的+1000),可能导致训练不稳定
2. 简化问题验证代码 - 在简单环境测试(如
CartPole):应该 100-200 episodes 内解决 - 如果简单环境都不 work,代码有
bug(检查梯度计算、优势估计等)
3. 监控关键指标 - 策略熵
4. 可视化策略行为 - 渲染几个
episode,看智能体在做什么:是随机游走?还是有明确策略? -
检查动作分布:是否某些动作从不选择?(可能网络初始化问题)
5. 检查超参数 - 学习率太大:训练曲线剧烈震荡 -
学习率太小:收敛极慢 - Batch size 太小:梯度估计方差大,不稳定 -
6. 常见 bug - 忘记 detach target:价值函数的目标
7. 对比 baseline - 用 Stable Baselines3
等成熟库跑同样任务,对比性能 - 如果库的结果好得多,说明自己实现有问题 -
如果库也不 work,可能是任务太难或超参数需要特殊调整
8. 逐步增加复杂度 - 先用最简单的 REINFORCE
验证环境和数据流 - 再加 baseline,检查方差是否降低 - 再升级到 A2C,检查
Critic 是否有效 - 最后升级到 PPO/SAC 等,享受性能提升
调试强化学习需要耐心和系统化方法,建议用 tensorboard
等工具记录所有指标,方便对比和回溯。
参考文献
以下是 Policy Gradient 和 Actor-Critic 领域的核心论文:
Williams, R. J. (1992). Simple statistical
gradient-following algorithms for connectionist reinforcement learning.
Machine Learning , 8(3-4), 229-256.论文链接 REINFORCE 算法,策略梯度方法的开创性工作
Sutton, R. S., McAllester, D. A., Singh, S. P., &
Mansour, Y. (2000). Policy gradient methods for reinforcement
learning with function approximation. NIPS .论文链接 策略梯度定理的严格证明
Silver, D., Lever, G., Heess, N., et al. (2014).
Deterministic policy gradient algorithms. ICML .论文链接 确定性策略梯度,DDPG 的理论基础
Mnih, V., Badia, A. P., Mirza, M., et al.
(2016). Asynchronous methods for deep reinforcement learning.
ICML .arXiv:1602.01783 A3C 算法,首个在 Atari 上与 DQN 竞争的 on-policy 方法
Schulman, J., Levine, S., Abbeel, P., et al.
(2015). Trust region policy optimization. ICML .arXiv:1502.05477 TRPO,引入信任域约束保证单调改进
Lillicrap, T. P., Hunt, J. J., Pritzel, A., et al.
(2016). Continuous control with deep reinforcement learning.
ICLR .arXiv:1509.02971 DDPG,将 DQN 扩展到连续动作空间
Schulman, J., Wolski, F., Dhariwal, P., et al.
(2017). Proximal policy optimization algorithms.arXiv:1707.06347 PPO,工业界最常用的策略梯度算法
Fujimoto, S., van Hoof, H., & Meger, D.
(2018). Addressing function approximation error in actor-critic
methods. ICML .arXiv:1802.09477 TD3,解决 DDPG 的 Q 值过估计问题
Haarnoja, T., Zhou, A., Abbeel, P., & Levine, S.
(2018). Soft actor-critic: Off-policy maximum entropy deep
reinforcement learning with a stochastic actor. ICML .arXiv:1801.01290 SAC,最大熵框架下的 off-policy 算法
Haarnoja, T., Zhou, A., Hartikainen, K., et al.
(2018). Soft actor-critic algorithms and applications.arXiv:1812.05905 SAC 的应用和自动温度调节
Schulman, J., Moritz, P., Levine, S., et al.
(2016). High-dimensional continuous control using generalized
advantage estimation. ICLR .arXiv:1506.02438 GAE,降低策略梯度方差的重要技术
从 REINFORCE 的蒙特卡洛策略梯度到 Actor-Critic 的 TD 方法,从 A3C
的异步并行到 PPO 的裁剪技巧,从 DDPG 的确定性策略到 SAC
的最大熵框架——策略梯度方法在过去三十年发展出了丰富的技术栈。这些算法不仅突破了
DQN
的离散动作限制,在连续控制任务中大放异彩,也在探索-利用平衡、样本效率、训练稳定性等方面提供了多样化的解决方案。
PPO 凭借简单性和鲁棒性成为工业界首选,SAC 和 TD3
则在对性能要求极高的机器人控制中占据统治地位。
然而,model-free 方法的样本效率仍然是瓶颈——即使是最先进的
SAC,在复杂任务上也需要数百万次交互。下一章我们将探索 model-based
方法:通过学习环境模型并在模型中规划,大幅减少与真实环境的交互次数,这将引领我们进入
Dyna 、 MuZero 、 Dreamer 等算法的世界。