一个智能体要如何在环境中学习最优行为?当 AlphaGo
在围棋盘上击败人类顶尖选手,当机器人学会走路和抓取物体,当推荐系统根据用户反馈不断优化推荐策略——这些背后都有一个共同的数学框架:强化学习。
强化学习不同于监督学习的"有标注数据就能训练",也不同于无监督学习的"寻找数据内在结构"。它面对的是一个更接近真实世界的问题:在没有明确正确答案的情况下,通过试错和奖励反馈,学习长期最优的决策策略 。
从骑自行车说起:强化学习的直觉
学习骑自行车是经典的强化学习过程。没有人会给你一本"标准骑行手册",告诉你在每个时刻应该如何调整把手和身体重心(没有监督学习的标签)。你需要自己尝试:稍微向左倾斜,车往左偏了;身体向右调整,车又往右偏。摔倒了是负反馈,保持平衡是正反馈。
经过数百次试错后,你的大脑学会了一套策略:根据当前的车身倾斜角度、速度、路面状况,实时决定如何调整身体和把手。这个策略不是通过背诵得来的,而是通过与环境交互、获得反馈、调整行为 这个循环逐步优化的。
强化学习的数学框架就是对这个过程的精确描述。
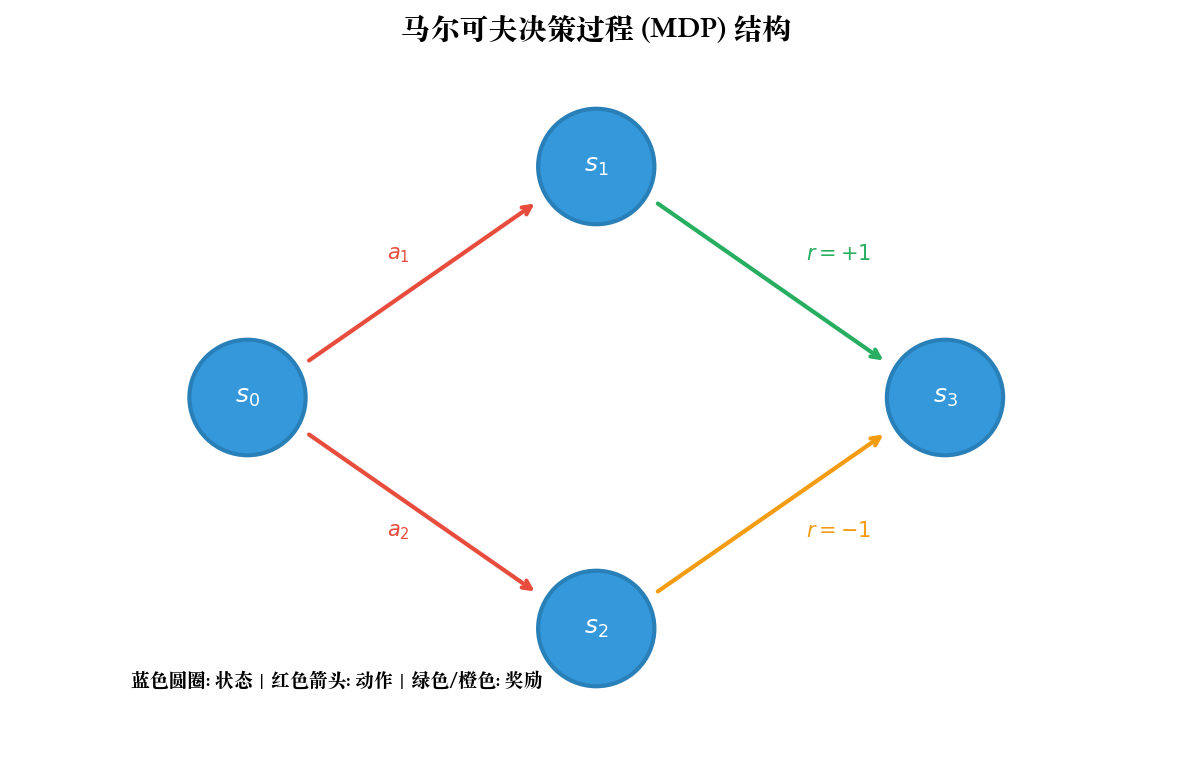
马尔可夫决策过程:强化学习的数学基础
强化学习的核心是马尔可夫决策过程( Markov Decision Process, MDP)。
MDP 是一个五元组:
$$ = (S, A, P, R, )
基本要素
状态空间
环境的所有可能状态。在骑自行车中,状态可能包括车身倾斜角度、速度、与障碍物的距离等。状态可以是离散的(如棋盘格子)或连续的(如机器人关节角度)。
动作空间
智能体可以执行的所有动作。可以是离散动作(如向上下左右移动)或连续动作(如施加多大力矩)。
转移概率
在状态
满足概率归一化条件:
奖励函数
在状态
折扣因子
衡量未来奖励的重要性。
马尔可夫性质
MDP
的核心假设是马尔可夫性 :未来只依赖于当前状态,与历史无关。
这个假设看似强,但在实践中很实用。如果当前状态包含了所有相关信息(如把最近几帧图像拼接作为状态),马尔可夫性就能满足。
策略:从状态到动作的映射
策略
确定性策略 :
直接给出动作。
随机策略 :
给出动作的概率分布。随机策略在探索和处理部分可观测环境时更有用。
回报与价值函数
为什么需要"累积回报"?一个钓鱼的故事
场景 :你在河边钓鱼
决策1:用便宜的鱼饵 -
立即结果:省了5块钱(即时奖励+5) -
长期结果:钓不到鱼,白坐一天(总收益-95)
决策2:用好鱼饵 -
立即结果:花了20块钱(即时奖励-20) -
长期结果:钓到大鱼,卖了200块(总收益+180)
关键洞察 :不能只看眼前利益(即时奖励),要看累积回报 !
累积回报的数学定义
智能体的目标是最大化累积回报。从时刻
符号解释 : -
为什么要"打折扣"?
类比:钱的时间价值
现在的100元 vs 10年后的100元,你要哪个?当然是现在的!因为: 1.
不确定性 :10年太久,可能拿不到 2.
机会成本 :现在的100元可以投资增值
在强化学习中也一样 :
折扣因子数学上 :保证无限步的回报有界(当直觉上 :远期奖励的不确定性更大,应该打折扣 -
实际上 :避免智能体过度延迟获取奖励
具体例子 : -
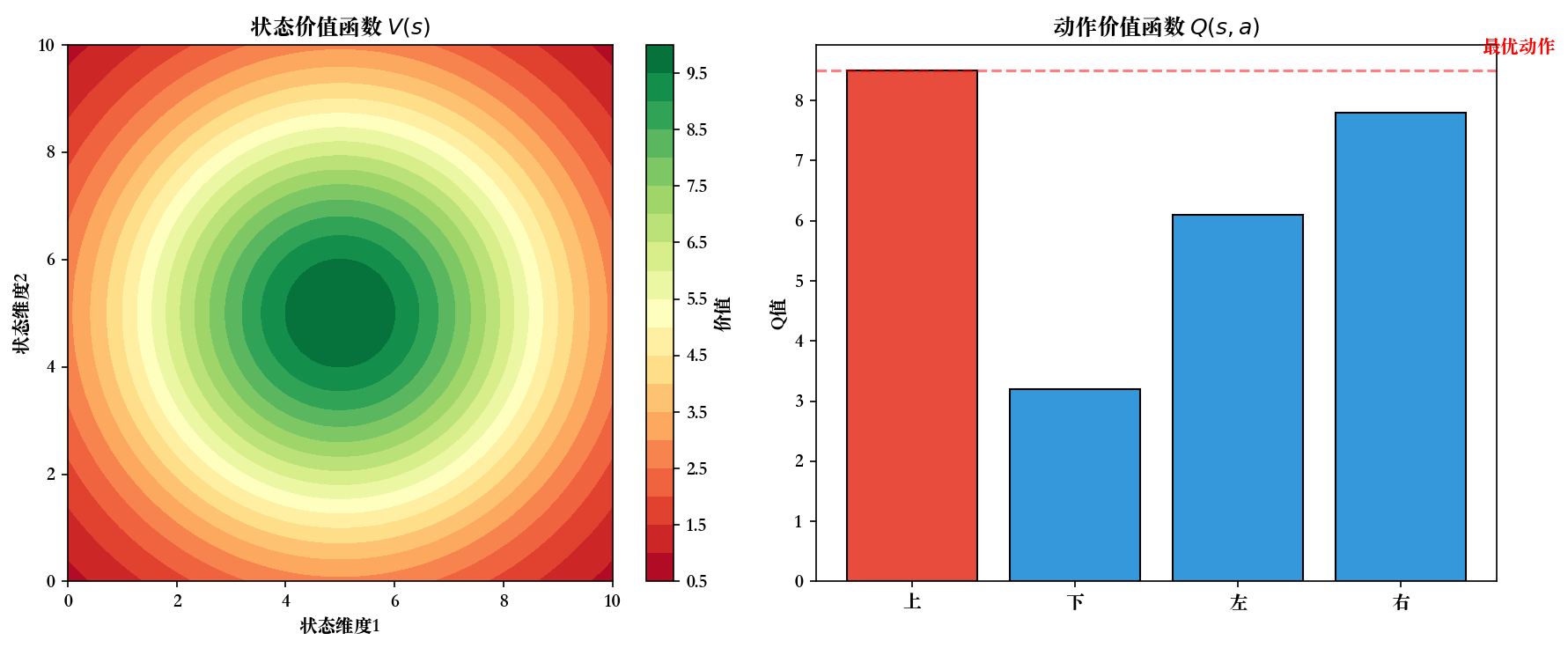
状态价值函数
从状态
动作价值函数
从状态
两者的关系:
Bellman
方程:价值函数的递归结构
价值函数满足递归关系,称为 Bellman 方程。这是强化学习理论的基石。
Bellman 期望方程 (对任意策略
推导逻辑 :
当前状态的价值 = 即时奖励的期望 + 下一状态价值的折扣期望。
展开
Bellman 最优方程 (对最优策略
定义最优价值函数:
最优 Bellman 方程:
最优策略:
数值示例 :
考虑一个简单的 2 状态 MDP:
状态:
动作:
转移概率和奖励:
0.5
5
0.5
10
0.9
0
0.1
15
0.7
2
0.3
8
1.0
3
计算
这是两个关于
即:
求解得:
动态规划方法:已知模型的最优控制
当环境模型(转移概率
策略评估:计算给定策略的价值函数
给定策略
迭代算法:
初始化
重复直到收敛:
对所有
这是 Bellman 期望方程的迭代形式。收敛性由 Banach 不动点定理保证(
Bellman 算子是收缩映射)。
策略改进:根据价值函数改进策略
给定
策略改进定理 :贪婪策略
证明 :
对任意状态
根据 Q 函数的定义:
如果在第一步选择
策略迭代算法
交替进行策略评估和策略改进:
初始化随机策略
策略评估 :求解
策略改进 :${k+1}(s) a {s'} P(s'|s,
a) [R(s, a, s') + V^{_k}(s')]如 果 {k+1} = _k$,停止;否则返回步骤 2
策略迭代保证收敛到最优策略
值迭代算法
直接迭代最优 Bellman 方程:
初始化
重复直到收敛:
提取最优策略:
值迭代实际上是策略迭代的简化版本:每次迭代隐式地进行了一次策略评估和改进。
收敛性 :
定义 Bellman 算子
可以证明
因此值迭代以指数速度收敛到唯一不动点
代码实现: GridWorld 环境
实现一个简单的网格世界,智能体从起点移动到终点,撞墙会停在原地。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 import numpy as npimport matplotlib.pyplot as pltfrom typing import Tuple , List class GridWorld : """ 简单的网格世界环境 参数: grid_size: (height, width),网格大小 start: (row, col),起点位置 goal: (row, col),终点位置 obstacles: List[(row, col)],障碍物位置 """ def __init__ (self, grid_size=(5 , 5 0 , 0 4 , 4 ): self.height, self.width = grid_size self.start = start self.goal = goal self.obstacles = set (obstacles) self.actions = [0 , 1 , 2 , 3 ] self.action_names = ['↑' , '↓' , '←' , '→' ] self.action_deltas = { 0 : (-1 , 0 ), 1 : (1 , 0 ), 2 : (0 , -1 ), 3 : (0 , 1 ) } self.reset() def reset (self ) -> Tuple [int , int ]: """重置环境,返回起点""" self.state = self.start return self.state def step (self, action: int ) -> Tuple [Tuple [int , int ], float , bool ]: """ 执行动作 返回: next_state: 下一状态 reward: 即时奖励 done: 是否到达终点 """ dr, dc = self.action_deltas[action] next_r = self.state[0 ] + dr next_c = self.state[1 ] + dc if (0 <= next_r < self.height and 0 <= next_c < self.width and (next_r, next_c) not in self.obstacles): self.state = (next_r, next_c) if self.state == self.goal: return self.state, 10.0 , True else : return self.state, -1.0 , False def get_transition_prob (self, state, action ): """ 获取转移概率(确定性环境) 返回: List[(next_state, prob, reward)] """ old_state = self.state self.state = state next_state, reward, done = self.step(action) self.state = old_state return [(next_state, 1.0 , reward)] def value_iteration (env: GridWorld, gamma=0.9 , theta=1e-6 , max_iter=1000 ): """ 值迭代算法 参数: env: 环境对象 gamma: 折扣因子 theta: 收敛阈值 max_iter: 最大迭代次数 返回: V: 状态价值函数, shape=(height, width) policy: 最优策略, shape=(height, width) """ height, width = env.height, env.width V = np.zeros((height, width)) for iter_count in range (max_iter): delta = 0 for r in range (height): for c in range (width): state = (r, c) if state == env.goal or state in env.obstacles: continue v = V[r, c] q_values = [] for action in env.actions: q = 0 transitions = env.get_transition_prob(state, action) for next_state, prob, reward in transitions: next_r, next_c = next_state q += prob * (reward + gamma * V[next_r, next_c]) q_values.append(q) V[r, c] = max (q_values) delta = max (delta, abs (v - V[r, c])) if delta < theta: print (f"值迭代在第 {iter_count + 1 } 次迭代后收敛" ) break policy = np.zeros((height, width), dtype=int ) for r in range (height): for c in range (width): state = (r, c) if state == env.goal or state in env.obstacles: continue q_values = [] for action in env.actions: q = 0 transitions = env.get_transition_prob(state, action) for next_state, prob, reward in transitions: next_r, next_c = next_state q += prob * (reward + gamma * V[next_r, next_c]) q_values.append(q) policy[r, c] = np.argmax(q_values) return V, policy def visualize_policy (env: GridWorld, V, policy ): """可视化价值函数和策略""" fig, (ax1, ax2) = plt.subplots(1 , 2 , figsize=(12 , 5 )) im1 = ax1.imshow(V, cmap='coolwarm' ) ax1.set_title('State Value Function V(s)' ) plt.colorbar(im1, ax=ax1) for r in range (env.height): for c in range (env.width): if (r, c) == env.goal: ax1.text(c, r, 'G' , ha='center' , va='center' , color='white' , fontsize=16 , fontweight='bold' ) elif (r, c) in env.obstacles: ax1.text(c, r, 'X' , ha='center' , va='center' , color='black' , fontsize=16 ) else : ax1.text(c, r, f'{V[r, c]:.1 f} ' , ha='center' , va='center' ) ax2.imshow(np.zeros((env.height, env.width)), cmap='gray' , alpha=0.3 ) ax2.set_title('Optimal Policy π*(s)' ) for r in range (env.height): for c in range (env.width): if (r, c) == env.goal: ax2.text(c, r, 'G' , ha='center' , va='center' , color='green' , fontsize=16 , fontweight='bold' ) elif (r, c) in env.obstacles: ax2.text(c, r, 'X' , ha='center' , va='center' , color='red' , fontsize=16 ) else : action = policy[r, c] ax2.text(c, r, env.action_names[action], ha='center' , va='center' , fontsize=20 ) plt.tight_layout() plt.savefig('gridworld_value_iteration.png' , dpi=150 ) plt.show() if __name__ == "__main__" : env = GridWorld( grid_size=(5 , 5 ), start=(0 , 0 ), goal=(4 , 4 ), obstacles=[(1 , 1 ), (2 , 2 ), (3 , 1 )] ) V, policy = value_iteration(env, gamma=0.9 , theta=1e-6 ) visualize_policy(env, V, policy) print ("\n 最优价值函数:" ) print (V) print ("\n 最优策略:" ) for r in range (env.height): for c in range (env.width): if (r, c) == env.goal: print ('G' , end=' ' ) elif (r, c) in env.obstacles: print ('X' , end=' ' ) else : print (env.action_names[policy[r, c]], end=' ' ) print ()
代码解读 :
1.
蒙特卡洛方法:无需模型的学习
动态规划需要完整的环境模型,但实际中环境模型往往未知或难以建模。蒙特卡洛(
Monte Carlo, MC)方法通过采样轨迹来估计价值函数,无需环境模型。
核心思想
MC 方法的基本思路:价值函数是期望回报,可以用样本均值近似:
其中
步骤 :
智能体按策略
对轨迹中的每个状态
更新
First-Visit MC vs Every-Visit
MC
First-Visit MC :
对每条轨迹,只在第一次访问状态
算法:
初始化
对每条轨迹:
计算每个时刻的回报
对每条轨迹,每次访问状态
两者的区别在于对同一轨迹中多次访问同一状态的处理。 First-Visit MC
更常用,且其无偏性易证明。
MC 策略评估的收敛性
定理 : First-Visit MC 方法收敛到真实价值函数:
其中
证明 :每次访问
MC 控制:策略改进
MC 方法也可以用于控制问题(寻找最优策略)。关键是估计
MC 控制算法 (基于 exploring starts):
初始化策略重 复 : 生 成 轨 迹 : 从 随 机 状 态 动 作 对 开 始 , 按 策 略 采 样 策 略 评 估 : 对 轨 迹 中 每 个
策略改进 :对每个Exploring Starts
假设 :
每个状态-动作对都有非零概率作为起点。这保证了所有状态-动作对都能被访问到。
ε-贪婪策略:平衡探索与利用
Exploring Starts 在实际中难以实现。更实用的方法是使用
以概率
On-Policy vs Off-Policy :
On-Policy :评估和改进的是当前执行的策略(如Off-Policy :评估一个策略(目标策略
MC 控制通常是 On-Policy 的。
增量式更新
存储所有回报并计算平均值的空间开销大。增量式更新公式:
其中
代码实现: MC 策略评估
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 import numpy as npfrom collections import defaultdictdef mc_policy_evaluation (env, policy, num_episodes=10000 , gamma=0.9 ): """ 蒙特卡洛策略评估( First-Visit) 参数: env: 环境对象 policy: 策略函数, policy(state) -> action num_episodes: 采样轨迹数 gamma: 折扣因子 返回: V: 状态价值函数字典 """ returns = defaultdict(list ) V = defaultdict(float ) for episode in range (num_episodes): trajectory = [] state = env.reset() done = False while not done: action = policy(state) next_state, reward, done = env.step(action) trajectory.append((state, action, reward)) state = next_state G = 0 visited_states = set () for t in range (len (trajectory) - 1 , -1 , -1 ): state, action, reward = trajectory[t] G = reward + gamma * G if state not in visited_states: visited_states.add(state) returns[state].append(G) V[state] = np.mean(returns[state]) if (episode + 1 ) % 1000 == 0 : print (f"完成 {episode + 1 } 条轨迹" ) return V def mc_control (env, num_episodes=10000 , gamma=0.9 , epsilon=0.1 ): """ 蒙特卡洛控制( On-Policy, ε-贪婪) 返回: Q: 动作价值函数字典 policy: 学到的策略 """ Q = defaultdict(lambda : np.zeros(len (env.actions))) returns = defaultdict(list ) for episode in range (num_episodes): trajectory = [] state = env.reset() done = False while not done: if np.random.random() < epsilon: action = np.random.choice(env.actions) else : action = np.argmax(Q[state]) next_state, reward, done = env.step(action) trajectory.append((state, action, reward)) state = next_state G = 0 visited_sa = set () for t in range (len (trajectory) - 1 , -1 , -1 ): state, action, reward = trajectory[t] G = reward + gamma * G if (state, action) not in visited_sa: visited_sa.add((state, action)) returns[(state, action)].append(G) Q[state][action] = np.mean(returns[(state, action)]) if (episode + 1 ) % 1000 == 0 : print (f"完成 {episode + 1 } 条轨迹" ) policy = lambda s: np.argmax(Q[s]) return Q, policy
MC 方法的优缺点 :
优点: - 无需环境模型 - 可以从实际经验或模拟中学习 -
可以专注于感兴趣的状态 - 简单、直观
缺点: - 需要完整的轨迹(必须等到 episode 结束) -
高方差(回报是多个随机奖励的和) - 在连续任务或长 episode 中效率低
时序差分学习:结合 MC 和 DP
的优点
时序差分( Temporal Difference, TD)学习是强化学习的核心,结合了 MC
的无模型特性和 DP 的 bootstrapping 。
TD(0):最简单的 TD 方法
TD(0)的更新规则:
TD 误差 :
与 MC 的对比 :
方法
更新目标
特点
MC
无偏,高方差,需要完整轨迹
TD(0)
有偏(初期),低方差,单步更新
TD 方法在每一步之后就可以更新,无需等待 episode 结束。这使得 TD
方法可以用于连续任务(没有明确结束状态的任务)。
TD(0)的收敛性
定理 ( Sutton, 1988):对于任意策略
学习率满足 Robbins-Monro 条件:Double subscripts: use braces to clarify _t _t = , _t _t^2 <
则 TD(0)几乎必然收敛到
常用的学习率:
Sarsa: On-Policy TD 控制
Sarsa( State-Action-Reward-State-Action)是 Q 函数的 TD 版本:
算法名称来源于更新所需的五元组:
Sarsa 算法 :
初始化$Q(s, a)对 每 个 : 初 始 化
重复(对 episode 中的每一步):
执行
Sarsa 是 On-Policy 方法:评估和改进的是当前执行的策略(如
Q-Learning: Off-Policy TD
控制
Q-Learning 是 TD 方法中最重要的突破之一( Watkins, 1989)。
Q-Learning 更新规则 :
与 Sarsa 的区别在于: Sarsa 使用实际执行的下一个动作
Q-Learning 算法 :
初始化$Q(s, a)对 每 个 : 初 始 化
根据
执行
Q-Learning 是 Off-Policy 方法:行为策略(如
Q-Learning 的收敛性 :
定理 ( Watkins & Dayan, 1992):如果:
所有状态-动作对被无限次访问
学习率满足 Robbins-Monro 条件
则 Q-Learning 收敛到最优 Q 函数
这是 Q-Learning
的巨大优势:可以从任意策略产生的数据中学习最优策略。
Sarsa vs Q-Learning:直觉对比
考虑"悬崖行走"环境:
1 2 3 4 S: 起点, G: 终点, C: 悬崖( reward=-100) S . . . . . . G C C C C C C C C
智能体从起点到终点,掉入悬崖会回到起点并获得大负奖励。
Sarsa( On-Policy) :
由于使用
Q-Learning( Off-Policy) :
Q-Learning
评估的是贪婪策略,假设不会随机探索。它学到的策略会沿着悬崖边缘走最短路径,但在执行时(由于
这说明: - Sarsa 更保守(考虑了探索的风险) - Q-Learning
更激进(评估的是最优策略)
TD(λ)与资格迹
TD(0)只使用一步的奖励进行 bootstrapping 。 TD(
TD( :
使用所有
其中
资格迹 ( Eligibility Trace):
资格迹是一种高效的实现方式,为每个状态维护一个迹
更新规则:
资格迹记录了状态的"功劳":最近访问的状态和频繁访问的状态有更高的迹,获得更多的信用分配。
特殊情况 :
-
代码实现: Sarsa 和
Q-Learning
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 import numpy as npdef sarsa (env, num_episodes=1000 , alpha=0.1 , gamma=0.9 , epsilon=0.1 ): """ Sarsa 算法( On-Policy TD 控制) 参数: env: 环境对象 num_episodes: 训练轮数 alpha: 学习率 gamma: 折扣因子 epsilon: 探索率 返回: Q: 学到的 Q 函数 """ Q = {} for r in range (env.height): for c in range (env.width): Q[(r, c)] = np.zeros(len (env.actions)) for episode in range (num_episodes): state = env.reset() if np.random.random() < epsilon: action = np.random.choice(env.actions) else : action = np.argmax(Q[state]) done = False while not done: next_state, reward, done = env.step(action) if np.random.random() < epsilon: next_action = np.random.choice(env.actions) else : next_action = np.argmax(Q[next_state]) td_target = reward + gamma * Q[next_state][next_action] td_error = td_target - Q[state][action] Q[state][action] += alpha * td_error state = next_state action = next_action if (episode + 1 ) % 100 == 0 : print (f"Sarsa 完成第 {episode + 1 } 轮" ) return Q def q_learning (env, num_episodes=1000 , alpha=0.1 , gamma=0.9 , epsilon=0.1 ): """ Q-Learning 算法( Off-Policy TD 控制) 返回: Q: 学到的 Q 函数 """ Q = {} for r in range (env.height): for c in range (env.width): Q[(r, c)] = np.zeros(len (env.actions)) for episode in range (num_episodes): state = env.reset() done = False while not done: if np.random.random() < epsilon: action = np.random.choice(env.actions) else : action = np.argmax(Q[state]) next_state, reward, done = env.step(action) td_target = reward + gamma * np.max (Q[next_state]) td_error = td_target - Q[state][action] Q[state][action] += alpha * td_error state = next_state if (episode + 1 ) % 100 == 0 : print (f"Q-Learning 完成第 {episode + 1 } 轮" ) return Q def sarsa_lambda (env, num_episodes=1000 , alpha=0.1 , gamma=0.9 , epsilon=0.1 , lambda_=0.9 ): """ Sarsa(λ) 算法(带资格迹) 参数: lambda_: 资格迹衰减因子 """ Q = {} for r in range (env.height): for c in range (env.width): Q[(r, c)] = np.zeros(len (env.actions)) for episode in range (num_episodes): E = {} for r in range (env.height): for c in range (env.width): E[(r, c)] = np.zeros(len (env.actions)) state = env.reset() if np.random.random() < epsilon: action = np.random.choice(env.actions) else : action = np.argmax(Q[state]) done = False while not done: next_state, reward, done = env.step(action) if np.random.random() < epsilon: next_action = np.random.choice(env.actions) else : next_action = np.argmax(Q[next_state]) td_error = reward + gamma * Q[next_state][next_action] - Q[state][action] E[state][action] += 1 for s in E: for a in range (len (env.actions)): Q[s][a] += alpha * td_error * E[s][a] E[s][a] *= gamma * lambda_ state = next_state action = next_action if (episode + 1 ) % 100 == 0 : print (f"Sarsa(λ)完成第 {episode + 1 } 轮" ) return Q if __name__ == "__main__" : from gridworld import GridWorld env = GridWorld(grid_size=(5 , 5 ), start=(0 , 0 ), goal=(4 , 4 ), obstacles=[(2 , 2 )]) print ("训练 Sarsa..." ) Q_sarsa = sarsa(env, num_episodes=1000 ) print ("\n 训练 Q-Learning..." ) Q_qlearn = q_learning(env, num_episodes=1000 ) print ("\n 训练 Sarsa(λ)..." ) Q_sarsa_lambda = sarsa_lambda(env, num_episodes=1000 , lambda_=0.9 ) policy_sarsa = {s: np.argmax(Q_sarsa[s]) for s in Q_sarsa} policy_qlearn = {s: np.argmax(Q_qlearn[s]) for s in Q_qlearn} print ("\n 策略对比完成" )
代码要点 :
Sarsa 使用
Q-Learning 使用a Q(S {t+1}, a)维 护 资 格 迹 矩 阵
三种方法都使用
❓ Q&A:强化学习基础常见疑问
Q1:为什么需要折扣因子
数学必要性 :
在无限时间步的任务中,无折扣回报
经济学解释 :
折扣因子反映了"时间价值":今天的 1 元比明天的 1
元更值钱。在强化学习中,这体现为:
早期获得的奖励更有价值(减少不确定性)
避免智能体无限期延迟获取奖励
实践影响 :
行为特征
适用场景
0.0 - 0.5
短视( myopic),只关注近期奖励
金融交易、快速决策
0.9 - 0.95
平衡,常用默认值
大多数任务
0.99 - 0.999
远视,重视长期收益
围棋、战略规划
1.0
无折扣(仅用于有限步任务)
有明确终止的游戏
选择建议 :
如果任务有明确终止状态( episodic),
如果任务是连续的,
通过交叉验证调优
Q2:
Bellman 方程为什么是"收缩映射"?这对收敛性有什么影响?
收缩映射定义 :
算子
其中
Bellman 算子的收缩性证明 :
定义 Bellman 算子:
证明:
Banach 不动点定理 :
收缩映射有唯一不动点,且任意初值的迭代序列都收敛到该不动点:
收敛速度:
指数收敛!这意味着值迭代和策略评估都能快速收敛。
实践意义 :
-
Q3:动态规划需要完整的模型,但实际中模型往往未知。这是否意味着
DP 没有实用价值?
模型可获得的情况 :
游戏规则已知 :棋类游戏(围棋、国际象棋)、电子游戏仿真环境 :机器人仿真器( MuJoCo 、
Gazebo)、自动驾驶仿真学习模型 :使用监督学习从数据中学习转移函数Model-Based RL :
结合模型学习和规划:
从真实交互中收集数据$ = {(s, a, r, s')}学 习 模 型 和
这称为 Dyna 架构( Sutton, 1990)。
DP 的理论价值 :
即使不直接使用 DP 算法,其理论框架( Bellman
方程、策略改进定理)是所有 RL 方法的基础:
TD 方法本质上是 DP 的采样版本
策略梯度方法的收敛性依赖于策略改进定理
深度 RL 中的目标网络源于 DP 的思想
实用建议 :
如果模型已知或容易建模,优先用 DP(最高效)
如果模型未知但可以采样,用 MC 或 TD
如果样本昂贵,考虑 model-based 方法
Q4:蒙特卡洛方法和 TD
方法哪个更好?
两者各有优劣,取决于任务特性:
蒙特卡洛方法 :
✅ 优点: - 无偏估计(期望回报的样本均值收敛到真实值) - 不依赖
Markov 性质 - 简单直观
❌ 缺点: - 高方差(回报是长序列随机奖励的和) -
需要完整轨迹(不能用于连续任务) - 学习慢(尤其是长轨迹)
TD 方法 :
✅ 优点: - 低方差(只依赖一步的随机性) - 单步更新(可用于连续任务)
- 学习快(充分利用 bootstrapping)
❌ 缺点: - 有偏(初始时基于不准确的估计) - 依赖 Markov 性质 -
对初始值敏感
经验法则 :
任务特征
推荐方法
理由
短 episode
MC
方差不大,无偏估计更重要
长/连续任务
TD
必须单步更新
高随机性
TD
MC 方差太大
函数逼近
TD
MC 的高方差会放大逼近误差
离线数据
MC
固定轨迹,无法 bootstrapping
组合使用 :
TD(
-
实践中
Q5:
Q-Learning 保证收敛到最优策略,为什么还需要 Sarsa?
Q-Learning 确实有更强的理论保证(收敛到
安全性考虑 :
Sarsa 是 On-Policy
方法,评估的是实际执行的策略 (包括探索)。在安全敏感的任务中(如机器人控制、医疗决策),
Sarsa 学到的策略会更保守。
示例(悬崖行走):
1 2 起点 ← ← ← ← ← ← ← 终点 悬崖悬崖悬崖悬崖悬崖悬崖悬崖悬崖
Q-Learning:学到沿悬崖边缘的最短路径(评估贪婪策略),但执行时会频繁掉入悬崖(因为
Sarsa:学到远离悬崖的安全路径(考虑了探索的风险)
探索策略的影响 :
Q-Learning
的收敛性要求所有状态-动作对被无限次访问,但不要求特定的探索策略。 Sarsa
的性能直接依赖于探索策略的质量。
收敛速度 :
理论上 Q-Learning 收敛更快(直接优化最优策略),但实践中:
如果探索策略与最优策略差异大, Q-Learning 的样本效率可能更低
Sarsa 在某些任务上收敛更稳定
实用建议 :
优先尝试 Q-Learning :更通用,理论更强如果出现以下情况,改用 Sarsa :
Q6:为什么资格迹能加速信用分配?
信用分配问题:在长轨迹中,早期的动作如何获得远期奖励的"功劳"?
TD(0)的局限 :
TD(0)只回传一步:
如果在时刻
资格迹的机制 :
资格迹
更新规则:
直觉 :
频率启发 :频繁访问的状态有更高的迹(累积效应)时效性启发 :最近访问的状态有更高的迹(衰减全局更新 :每个 TD 误差所有状态 (根据其资格迹权重)
示例 :
假设轨迹:
TD(0): - 只有
Sarsa(
假设在
所有状态同时更新:
一步就将奖励信号传播到了整条轨迹 !
实践效果 :
在长轨迹任务中, Sarsa(
代价:需要为每个状态维护资格迹(内存开销)
Q7:如何选择合适的探索策略?ε-贪婪有哪些替代方案?
ε-贪婪的问题 :
探索是均匀随机的(没有利用先验知识) -
对所有动作等概率探索(即使明显差的动作)
改进方案 :
1. 衰减 ε-贪婪 :
随时间降低探索率:
常见设置:
2. Boltzmann 探索( Softmax) :
根据 Q 值的相对大小选择动作:
温度参数
优点: Q 值高的动作有更高的选择概率。
3. UCB( Upper Confidence Bound) :
基于不确定性的探索:
其中
直觉:探索那些不确定的动作(访问次数少)。
4. 噪声网络( NoisyNet) :
在网络参数中加入可学习的噪声(详见第六章)。
实践建议 :
场景
推荐方法
原因
简单任务
ε-贪婪 + 衰减
简单有效
连续动作空间
参数噪声(如 OU 噪声)
ε-贪婪不适用
深度 RL
NoisyNet
探索与策略参数耦合
样本昂贵
UCB
最优探索效率
多臂老虎机
Thompson 采样
贝叶斯最优
Q8: TD
方法的"有偏性"在实践中有多大影响?
TD 方法的偏差来源于 bootstrapping:用当前估计
偏差分析 :
假设真实价值为
初始时偏差可能很大,但随着
方差对比 :
MC 方差(假设
实践影响 :
在大多数任务中,低方差比无偏性更重要 :
深度 RL:函数逼近器(神经网络)会放大方差
长 episode: MC 的方差随 episode 长度线性增长
样本效率: TD 能从相同样本数中学到更多
经验结论 :
TD 方法通常比 MC 更快收敛(尤其是 TD(
在高方差任务中, TD 的优势更明显
MC 在短 episode 、离线数据场景中仍有价值
Q9:如何设置学习率
学习率控制每次更新的步长,对收敛性和稳定性至关重要。
理论要求( Robbins-Monro 条件) :
保证收敛的充要条件:
满足条件的例子:
-
固定学习率 :常 数
优点: - 简单 - 能适应非平稳环境(近期样本权重更大)
缺点: - 不满足 Robbins-Monro 条件(理论上不保证收敛到最优) -
最终会在最优解附近振荡
常用值:
自适应学习率 :
1. 基于访问次数 :
其中
优点: - 满足 Robbins-Monro 条件 - 频繁访问的状态学习率自动降低
缺点: - 后期学习慢 - 需要维护访问计数
2. AdaGrad 风格 :
借鉴深度学习的自适应优化器:
其中
3. Adam 风格 :
使用一阶和二阶矩估计:
实践建议 :
场景
推荐方法
参数
简单表格 RL
固定学习率
深度 RL
Adam 优化器
在线学习
固定学习率
离线学习
衰减学习率
初始 0.1,衰减到 0.001
非平稳环境
固定学习率
保持适应性
调优技巧 :
从较大的学习率开始(如 0.1),观察训练曲线
如果不稳定/发散,降低学习率
如果收敛太慢,增大学习率
使用 learning rate schedule(如线性衰减、指数衰减)
Q10:马尔可夫性假设在实际问题中经常不满足,如何处理部分可观测问题?
部分可观测马尔可夫决策过程( POMDP) :
智能体不能直接观察状态
示例: - 机器人导航 :传感器读数(观测)≠
真实位置(状态) - 医疗诊断 :症状(观测)≠ 疾病(状态)
- 金融交易 :市场数据(观测)≠ 市场状态(状态)
解决方案 :
1. 状态增强( State Augmentation) :
将历史观测拼接为扩展状态:
在深度 RL 中常用帧堆叠( frame stacking):
1 2 state = np.concatenate([frame_t, frame_{t-1 }, frame_{t-2 }, frame_{t-3 }], axis=0 )
优点:简单,适用于短期记忆 缺点:状态空间维度爆炸
2. 循环神经网络( RNN) :
使用 LSTM/GRU 处理观测序列,隐藏状态
优点:能处理长期依赖 缺点:训练困难(梯度消失/爆炸)
3. 信念状态( Belief State) :
维护状态的概率分布(信念):
使用贝叶斯更新:
在信念空间上求解 MDP 。
优点:理论完备 缺点:计算复杂度高(连续状态空间不可行)
4. Transformer (现代方法):
使用自注意力机制处理观测序列:
优点:能捕捉长距离依赖,并行化训练 缺点:计算开销大
实践建议 :
场景
推荐方法
示例
短期部分可观测
帧堆叠
Atari 游戏(堆叠 4 帧)
长期记忆需求
LSTM/GRU
对话系统、策略游戏
高度不确定性
信念状态
机器人定位( SLAM)
大规模序列
Transformer
决策 Transformer
诊断方法 :
如果怀疑马尔可夫性不满足,检查:
智能体是否会在相同观测下做出不同决策?
奖励信号是否延迟很久才出现?
环境是否有隐藏状态(如对手意图)?
如果是,考虑状态增强或 RNN 。
🎓 总结:强化学习核心要点
MDP 框架 :
强化学习的核心是马尔可夫决策过程
Bellman 方程(记忆公式) :
方法论三角 :
1 2 3 4 动态规划(已知模型) / \ / \ 蒙特卡洛(无模型,高方差) 时序差分(无模型,低方差)
实战 Checklist :
核心直觉(记忆口诀) :
价值 = 即时奖励 + 未来折扣价值
策略改进 = 贪婪选择高价值动作
学习 = 用经验修正估计( MC/TD)
下一章预告 :
第一章建立了强化学习的理论基础,但所有方法都局限于小规模的表格型问题(状态和动作数量有限)。当状态空间巨大(如
Atari 游戏的像素空间)或连续时,表格方法无法扩展。
下一章将介绍如何用深度神经网络逼近 Q
函数,诞生了深度强化学习的开山之作—— DQN( Deep
Q-Network)。我们将深入探讨:
深度 Q 网络的架构
经验回放和目标网络的作用
DQN 的变体: Double DQN 、 Dueling DQN 、 Prioritized Experience
Replay
Rainbow:集大成者
完整的 Atari 游戏实现
📚 参考文献
Sutton, R. S., & Barto, A. G. (2018). Reinforcement
Learning: An Introduction (2nd ed.). MIT Press.
Watkins, C. J., & Dayan, P. (1992). Q-learning. Machine
Learning , 8(3-4), 279-292.
Sutton, R. S. (1988). Learning to predict by the methods of temporal
differences. Machine Learning , 3(1), 9-44.
Sutton, R. S., Precup, D., & Singh, S. (1999). Between MDPs and
semi-MDPs: A framework for temporal abstraction in reinforcement
learning. Artificial Intelligence , 112(1-2), 181-211.
Bellman, R. (1957). Dynamic Programming . Princeton
University Press.
Silver, D. (2015). UCL Course on Reinforcement Learning.
https://www.davidsilver.uk/teaching/
Levine, S. (2023). CS 285: Deep Reinforcement Learning. UC
Berkeley.
Dayan, P. (1992). The convergence of TD(Machine Learning ,
8(3-4), 341-362.
本文是强化学习系列的第一篇,为整个系列奠定理论基础。后续章节将深入探讨深度强化学习、策略优化、探索策略、多智能体学习等前沿主题。
 $$
$$