学习率(Learning Rate, LR)是深度学习里最重要、也最容易“看起来像玄学”的超参数。它既像汽车的油门(决定你每一步走多快),也像方向盘的灵敏度(太敏感会蛇形走位甚至翻车,太迟钝又永远到不了目的地)。
这篇文章会从最简单的二次函数出发,把“学习率为什么会影响稳定性、为什么训练后期要降学习率、为什么 warmup 常见”讲清楚。
一句话把学习率讲清楚
把训练想象成“在雾里下山”:
- 参数
是你的位置; - 损失
是海拔(越低越好); - 梯度
是“坡度方向提示”; - 学习率
是“你每一步迈多大”。
你每一步大致按下面走:
其中
学习率的核心矛盾就一句话:
越大越快,但越容易不稳定; 越小越稳,但越慢、也可能卡住。
接下来我们用“从最简单的二次函数”开始,把这句话拆开讲透。
最小可用数学:为什么“太大就炸,太小就慢”
¶从一维抛物线开始(最重要的直觉)
考虑最简单的损失:
梯度是:
做梯度下降:
你看到一个关键系数:
- 若
,会收敛; - 若
,会发散(来回跳并越跳越大)。
于是得到稳定条件:
类比:你下山时每一步都按“坡度”迈。如果坡太陡(
¶多维情况下,“最陡的方向”决定是否爆炸
把
其中
一句话:训练是否会炸,往往由“最陡那条方向”决定。
类比:你在山谷里走路,整体看起来很平缓,但某一条方向上突然很陡(比如悬崖边)。你迈步时只要有分量朝那条方向,就可能摔下去。
¶GIF:二维“椭圆谷底”里为什么会走成“之”字
二维二次函数是理解“曲率不均匀导致震荡”的最佳玩具模型。考虑:
当
1 | import numpy as np |
¶为什么深度网络更难:曲率在训练中会变
真实神经网络不是二次函数,
- 梯度是随机的(mini-batch);
- 不同层/不同参数的“有效尺度”差异巨大;
- 还会有动量、归一化、权重衰减、裁剪等“附加物理”。
所以现代训练几乎不会只用一个常数学习率跑到底,而是用学习率调度(schedule):
¶更进一步:
上面的二次函数例子有个隐藏前提:曲率
梯度不会变化得太快(损失曲线不会突然“折成直角”)。
一种常见表述是:对任意
这意味着“局部曲率”不会超过某个上界
通常就能保证每步不至于把损失抬高(直观上是“别一步跨太大”)。
类比:你在一个城市里开车,
¶强凸(strongly convex)与“为什么后期需要降低学习率”
如果函数在最优点附近像一个“碗”,并且碗的曲率不会太小(
- 碗太浅:你靠近最低点后,坡度很小,继续用大步长会来回晃;
- 碗够“硬”:你能更快被拉回最低点附近。
很多理论告诉我们:在随机梯度(有噪声)下,学习率通常需要逐步变小,才能把“最后那点抖动”压下去。这就是 schedule 后期 decay/cooldown 的一个根源:让你从“探索”切换到“精修”。
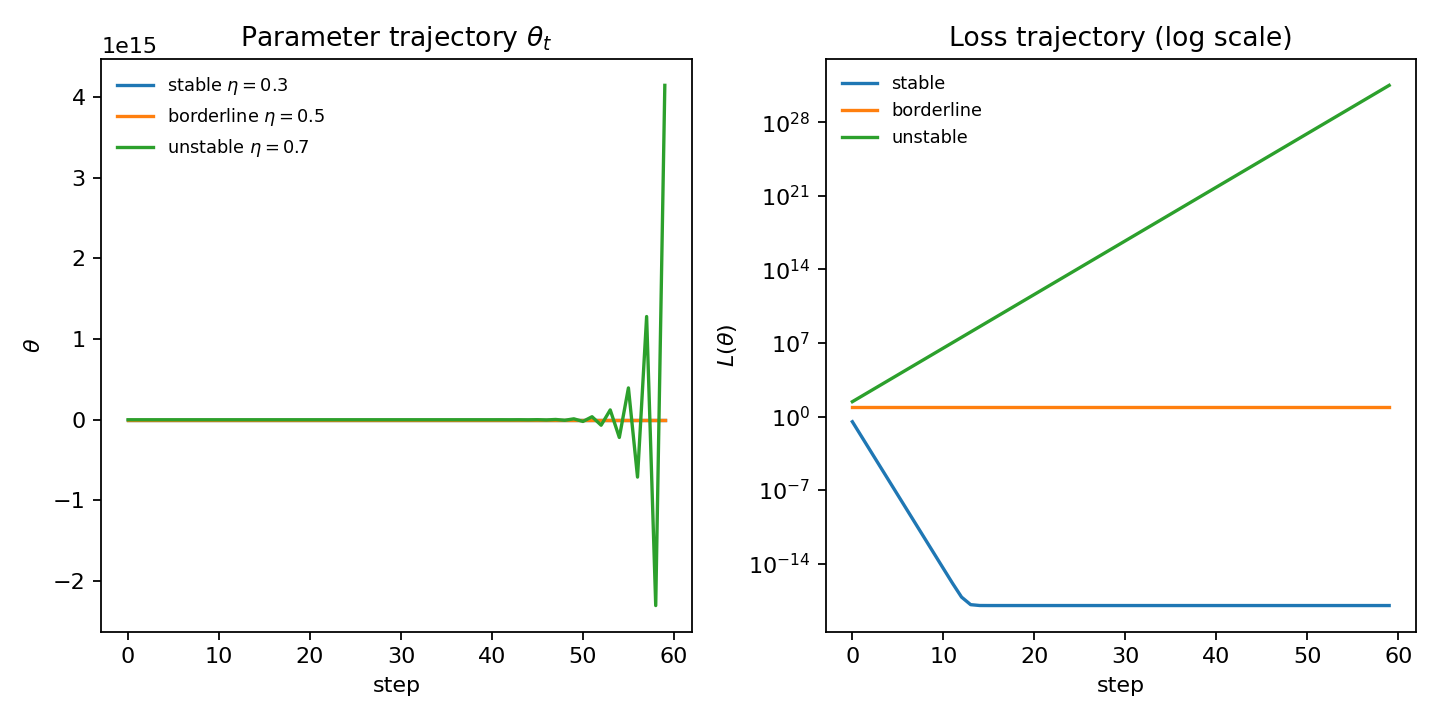
¶一维二次函数里“稳定 / 临界 / 发散”长什么样
用
- 稳定:
,参数与 loss 都会快速衰减;\ - 临界:
,会在谷底两侧来回“弹跳”,loss 降得很慢;\ - 发散:
,振幅越来越大,loss 直接爆炸。
1 | import matplotlib.pyplot as plt |
学习率与“噪声”:为什么 batch size 会影响学习率
¶随机梯度的两张脸:方向有用,噪声也很大
mini-batch 梯度可以看成:
其中
- 好处:噪声让你不容易困在“很尖的坏坑”,像在地形里加了点抖动;
- 坏处:噪声让大步长更容易“抖飞”,训练不稳定。
类比:你蒙眼下山,手里拿指南针(梯度方向),但指南针会抖(噪声)。你走得越快(学习率大),抖动造成的偏差越大。
¶经典经验:线性缩放法则与 warmup(大 batch 训练)
很多设置里,增大 batch size 可以减少梯度噪声,因此人们常用经验:
- batch 变大
倍,学习率也乘 (线性缩放); - 但训练初期“系统还没稳定”,所以先用 warmup 把学习率从小慢慢升到目标值。
warmup 的典型形式(线性 warmup):
近年的研究进一步解释了 warmup 的作用:它往往不是“为了收集 Adam 的统计量”这么简单,而是帮助模型进入更“好条件”的区域,从而能承受更大的目标学习率(见后文“最新进展”部分)。
动量:学习率的“隐形放大器”
¶SGD + Momentum 的更新与直觉
动量(以经典形式为例):
其中
类比:你推一个很重的购物车下坡:
是你当下看到的坡度; 是车的速度(带惯性); 越大,车越“刹不住”,但也越能穿过小坑洼; - 学习率
相当于“你给速度换算成位移的比例”。
¶为什么动量会让你更容易“过冲”
直觉上,动量会把一段时间内的梯度方向叠加起来,相当于“长期沿一个方向加速”。因此:
- 同样的
,加动量后等效步长更大; - 所以很多时候 SGD+momentum 的可用学习率上限会更低,否则会更容易震荡。
这也是为什么一些训练 recipe 会写:
- SGD 的 base LR 比 AdamW 大;
- 但 SGD + momentum 需要更谨慎的 warmup/decay;
- 或者配合更强的正则化(weight decay、label smoothing 等)稳住。
自适应优化器:学习率“变成一组学习率”
如果说 SGD 的学习率是一把锤子(全局同一个
¶Adam 的核心公式(一定要看懂)
Adam(省略一些细节,只保留关键结构):
其中
你应该抓住一句话:
Adam 的“有效学习率”大致是
,所以每个参数的步长会随其梯度尺度自动缩放。
类比:同一辆车在不同路面(不同参数维度)行驶。路面越颠(梯度方差越大),系统自动把那一侧轮子的扭矩(步长)调小,避免打滑。
¶为什么 Adam 仍然需要 warmup(而且经常更需要)
很多人以为:Adam 都自适应了,为什么还要 warmup?
一个关键原因:训练初期的统计量不稳定 + 某些方向的“预条件化曲率”很大,导致你如果一上来就用目标学习率,容易出现大幅抖动(loss spike)甚至训练失败。
这也是近年关于 warmup 的理论解释里经常出现的关键词:sharpness / preconditioned sharpness(可理解为“有效曲率”)。
学习率调度(schedule)大全:从老办法到大模型默认
把 schedule 看成“训练过程的配速策略”:
- 前期:探索更大范围(跑得快)
- 中期:稳定推进(匀速)
- 后期:精细收敛(减速、微调)
先看一张“最常用曲线”对比图(同样由
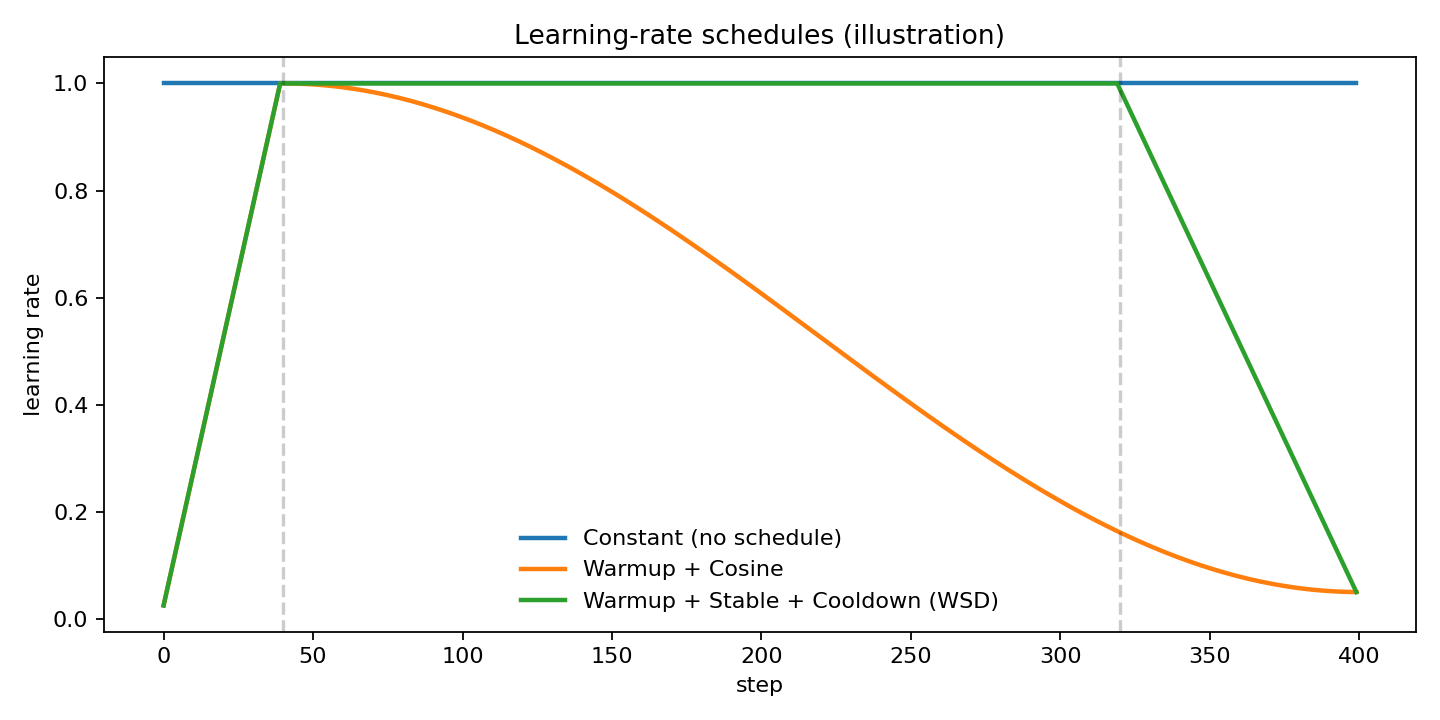
¶常数学习率(Constant)
优点:简单。
缺点:几乎总会在“速度 vs 稳定”之间两难:要么前期太慢,要么后期太抖。
¶Step decay(台阶式)
例如每到某些 epoch 乘以
类比:跑步时每过一段路程突然把速度降一档。
优点:实现简单。
缺点:变化不平滑,可能造成训练指标突然波动。
¶Exponential decay(指数衰减)
优点:平滑。
缺点:后期可能衰得太快,等效“刹车过早”,尤其在长训练中。
¶Cosine decay(余弦退火,深度学习最常用之一)
(最常见版本:从峰值衰到一个最小值)
直觉:一开始减速慢(保持探索),后面减速快(冲向收敛)。
大模型训练中常见结构是:
- warmup:线性升到
- cosine:从
退到
¶Cosine warm restarts(SGDR)
余弦衰到低点后又“重启”到高学习率,再衰一次。
直觉:像周期性“冲坡”,有时能跳出局部坏盆地。
在现代大模型预训练中,不如纯一次性 cosine / WSD 常见,但在一些中小模型与某些任务上仍有价值。
¶One-cycle(超级收敛思想)
核心:学习率先升后降(并配合动量反向变化)。
直觉:前期把学习率推到接近稳定边界,加速探索;后期快速降下来收敛。
很适合“训练步数较短、希望快速到一个不错解”的场景。
¶逆平方根(Transformer 经典 schedule)
在 Transformer 早期训练 recipe 中很常见的一类形式(示意):
直觉:warmup 后开始按
这类 schedule 的精神是:长期训练别衰太快。
¶WSD(Warmup–Stable–Decay):近年大模型训练的重要趋势
WSD 的核心形状:
- warmup:上升
- stable:长时间保持常数学习率
- decay/cooldown:最后线性(或其他形式)降到很小
直觉:中段“匀速巡航”,最后“进站刹车”。
为什么它近年很受欢迎?
- 它比 cosine 更“可复用”:你可以先训练一段稳定期,后面想延长训练时不必从头设计一个依赖总步数的半周期 cosine。
- 很多工作观察到 cooldown 开始时损失会出现“明显下降”,像模型终于被允许“精细贴合”盆地。
(后文会结合 2025 的理论解释更详细讲。)
从“能跑”到“跑得好”:一套可操作的学习率调参流程
下面给一套你可以在绝大多数任务里复用的流程(从小白视角写,但足够深)。
¶先搞清楚:你训练失败到底是哪种失败?
训练“坏掉”常见有三类:
- 直接发散:loss 变成 NaN/inf,或者几步内冲天。
- 抖动不收敛:loss 在高位大幅波动,指标上不去。
- 看似稳定但学不动:loss 缓慢下降甚至平台期很早出现。
对应的学习率结论通常是:
- (1)(2):
太大(或动量太大、或缺少 warmup、或裁剪/正则不够) - (3):
太小(或 schedule 衰减太快、或 batch 太小噪声太大)
¶用 “LR range test” 快速找可行区间(强烈推荐)
经典做法:在很短的训练里,让学习率从很小指数增长到很大,观察 loss 什么时候开始明显上升/发散。
直觉:你在“试探油门”,找到“刚好不翻车”的上限。
简化版伪代码(PyTorch):
1 | import math |
你会得到一个曲线:
- 初期 loss 下降(学习开始)
- 到某个点开始抖动甚至上升(接近稳定边界)
经验:把“刚开始明显变差前”的学习率当作
¶选择 schedule:小模型 vs 大模型的经验差异
- 中小模型(训练步数不算特别长):cosine / one-cycle 往往很稳妥。
- 大模型预训练(训练极长、可能要多次续训):WSD 或 schedule-free 值得优先考虑。
一个很实用的默认(尤其是 AdamW):
- warmup:1%~5% steps(大 batch 或很深模型倾向更长)
- stable:大部分训练保持
- cooldown:最后 10%~20% steps 线性降到
(比如 的 0.1 倍或更小)
¶“学习率、batch、权重衰减”三者要一起看
很多人只调学习率,然后觉得“怎么总是不稳”。实际上这三者高度耦合:
- batch 影响梯度噪声;
- weight decay 影响参数尺度(等价于持续把参数往 0 拉);
- 学习率决定你每一步“顺着梯度走多远”。
类比:你驾驶一辆车:
- learning rate 是油门;
- batch size 是路面摩擦/风噪(稳定性);
- weight decay 像一直有个刹车在轻踩(让车别越跑越飘)。
不稳定时不要只想着“降学习率”,很多时候:
- 加一点梯度裁剪(clip norm)
- 适当加 weight decay
- 或者延长 warmup
会比一味降
代码:从零实现常用 schedule(PyTorch)
下面给一个“够用且清晰”的实现:warmup + cosine / warmup + WSD(cooldown 线性)。
¶Warmup + Cosine
1 | import math |
¶Warmup + Stable + Decay(WSD)
1 | def lr_wsd(step, total_steps, warmup_steps, cooldown_steps, lr_max, lr_min=0.0): |
¶把它接到 optimizer 上(训练循环骨架)
1 | import torch |
你可以像这样传入 schedule:
1 | schedule_fn = lambda step, total_steps: lr_wsd( |
最新研究进展:大家在“学学习率”什么?
如果你把学习率看成“油门曲线”,那么近年的研究大致沿着三条路在推进:
- 更好的油门曲线:cosine 之外,WSD、power-law family、token/batch agnostic schedule。
- 把油门交给系统:schedule-free(不需要指定总步数的 schedule)、甚至 learning-rate-free(让算法自动估计合适步长)。
- 解释为什么有效:warmup、cooldown 的机制解释,稳定边界、曲率/尖锐度(sharpness)视角,和大模型不稳定的预测。
下面按时间线串起来。
¶2023:Learning-rate-free 的代表——D-Adaptation
一句话:尽量不让你手动调 base learning rate。
D-Adaptation(2023,Meta)提出用一种理论驱动的方式自动估计步长尺度,使得在很多任务上能接近手调学习率的效果。
你可以把它理解成:传统方法需要你告诉系统“从起点到终点大概有多远”(步长尺度),而 D-Adaptation 试图在训练过程中估计这个“距离尺度”,从而自动设定合适的步长。
参考:Learning Rate-Free Learning by D-Adaptation (Meta, 2023)
¶2024:Schedule-Free AdamW(The Road Less Scheduled)
经典痛点:很多 schedule 需要你提前知道总训练步数
- 训练到一半发现还想继续;
- 或者想做不同训练预算的对比;
- 或者数据/算力不确定。
Schedule-Free AdamW(2024)提出一种做法:干脆不显式做 schedule,但性能能与有 schedule 的方法竞争。
直觉理解:它把“调度”和“迭代平均”等思想统一起来,让算法在不需要知道停止时间
参考:Schedule-Free AdamW (arXiv:2405.15682)
¶2024:Why Warmup?——warmup 机制被更系统地解释
2024 的一条重要结论是:warmup 的主要收益往往是让网络能承受更大的目标学习率,而不是仅仅“让 Adam 统计量更准”。
这会改变你调参的思路:
- 你不是在问“warmup 要不要”
- 而是在问“我希望最终的
能有多大、稳定边界在哪,warmup 帮我把边界推到哪里”
参考:Why Warmup the Learning Rate? (arXiv:2406.09405)
¶2024:Power Scheduler——对 batch size 与 token 数不敏感
大模型预训练的现实痛点是:你经常会换 batch size、换训练 tokens(预算变化),而最优学习率也会跟着漂移。
Power Scheduler(2024)发现并利用一种 学习率、batch size、训练 tokens 的幂律关系,构建出对 batch/token 更“免调”的调度方式,并强调与
参考:Power Scheduler (arXiv:2408.13359)
¶2023–2024:用“小模型复现大模型不稳定”——学习率稳定性研究
大模型训练常见“同样超参,小模型没事,大模型炸了”的现象。Wortsman 等工作提出:很多不稳定性其实能在小模型里通过更高学习率复现,从而可以用更低成本研究:
- 哪些干预能降低对学习率的敏感性(warmup、weight decay、参数化等);
- 能否在训练早期通过某些信号预测后续不稳定。
参考:Small-scale proxies for large-scale Transformer instabilities (arXiv:2309.14322)
¶2024:No More Adam?——把关键放回“学习率尺度”
一条很“反直觉但很有启发”的路线是:也许 Adam 的优势很大部分来自“不同参数组的有效学习率尺度被自动调平”。
2024 的 SGD-SaI 提出在初始化时基于某种信号(例如 g-SNR)对不同参数组做学习率缩放,从而用更接近 SGD 的方法获得接近 AdamW 的效果,并且显著减少优化器状态的显存占用。
这对学习率研究的意义是:学习率不只是一个数,而是一个“与参数尺度/信噪比耦合的系统设计问题”。
参考:No More Adam / SGD-SaI (arXiv:2412.11768)
¶2025:cosine vs WSD 的理论联系(凸优化视角)
2025 的一条很有意思的观察是:一些大模型训练中的学习率曲线(尤其是 WSD 的 cooldown)在形状上和某些凸优化理论界非常接近,并且 cooldown 的收益在界里体现为“去掉了对数项”等。
你不需要完全理解那套界,但你可以记住结论:
- WSD 的 cooldown 不是“玄学的最后一脚刹车”,它能在一些理论模型中被解释为更好的收敛项;
- 这也提供了在不同 schedule 间迁移 base learning rate 的思路。
参考:Convex theory view of WSD cooldown (arXiv:2501.18965)
FAQ:最常见的学习率问题(小白高频)
¶“我该用 AdamW 还是 SGD?”
如果你是小白并且目标是“先跑通、稳定产出”:
- 默认:AdamW + warmup + cosine/WSD。
如果你追求更低显存、更强可解释性、或在某些视觉任务上想追极致:
- SGD(通常配动量)仍然很强,但更依赖调参经验。
¶“loss 一开始就炸怎么办?”
按优先级排查(从最有效到次要):
- 把
降一个数量级试试; - 增加 warmup(或把 warmup 起点设得更小);
- 打开梯度裁剪;
- 检查混合精度(loss scaling)与数值稳定;
- 适当增加 weight decay(尤其是大模型)。
¶“loss 不炸但不怎么降怎么办?”
常见原因:
- 学习率太小;
- 衰减太快(过早进入小学习率阶段);
- batch 太小导致噪声很大,模型“原地抖动”;
- 数据/标签问题(这不是学习率能救的)。
策略:
- 做 LR range test 找上限;
- 让中段更长时间保持在较大
(WSD 的 stable 部分很适合)。
一页速查表(把“怎么选学习率”落地)
¶AdamW 常见起手式(通用)
- schedule:warmup + cosine 或 warmup + WSD
- warmup:1%~5%
- cooldown(若用 WSD):10%~20%
- 梯度裁剪:
(大模型常用)
¶你应该关注的 3 个指标(比“看 loss”更直接)
- 训练是否接近稳定边界:是否出现持续的 loss spike / 梯度范数爆炸迹象
- 有效步长是否过小:学习太慢、长期平台
- 对学习率的敏感性:轻微改动
是否导致结果大幅变化(越敏感越说明你在边界附近/系统不稳)
¶当你不知道选 cosine 还是 WSD
- 训练长度固定、不会续训:cosine 很稳妥;
- 训练长度可能变化、需要续训/多预算对比:优先 WSD;
- 想尽量少调 schedule:可以关注 schedule-free / learning-rate-free 方向(但要看你代码栈是否方便接入)。
参考资料(按本文提到的关键脉络)
- Learning Rate-Free Learning by D-Adaptation (Meta, 2023)
- Schedule-Free AdamW (arXiv:2405.15682)
- Why Warmup the Learning Rate? (arXiv:2406.09405)
- Power Scheduler (arXiv:2408.13359)
- Small-scale proxies for large-scale Transformer instabilities (arXiv:2309.14322)
- Convex theory view of WSD cooldown (arXiv:2501.18965)
- No More Adam / SGD-SaI (arXiv:2412.11768)
- 本文标题:学习率:从入门到大模型训练的终极指南
- 本文作者:Chen Kai
- 创建时间:2026-01-27 00:00:00
- 本文链接:https://www.chenk.top/学习率:从入门到大模型训练的终极指南(2026)/
- 版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!